Writing Interpreters in Rust: a Guide
Welcome!
In this book we will walk through the basics of interpreted language implementation in Rust with a focus on the challenges that are specific to using Rust.
At a glance, these are:
- A custom allocator for use in an interpreter
- A safe-Rust wrapper over allocation
- A compiler and VM that interact with the above two layers
The goal of this book is not to cover a full featured language but rather to provide a solid foundation on which you can build further features. Along the way we'll implement as much as possible in terms of our own memory management abstractions rather than using Rust std collections.
Level of difficulty
Bob Nystrom's Crafting Interpreters is recommended introductory reading to this book for beginners to the topic. Bob has produced a high quality, accessible work and while there is considerable overlap, in some ways this book builds on Bob's work with some additional complexity, optimizations and discussions of Rust's safe vs unsafe.
We hope you find this book to be informative!
Further reading and other projects to study:
All the links below are acknowledged as inspiration or prior art.
Interpreters
- Bob Nystrom's Crafting Interpreters
- The Inko programming language
- kyren - piccolo and gc-arena
Memory management
- Richard Jones, Anthony Hosking, Elliot Moss - The Garbage Collection Handbook
- Stephen M. Blackburn & Kathryn S. McKinley - Immix: A Mark-Region Garbage Collector with Space Efficiency, Fast Collection, and Mutator Performance
- Felix S Klock II - GC and Rust Part 0: Garbage Collection Background
- Felix S Klock II - GC and Rust Part 1: Specifying the Problem
- Felix S Klock II - GC and Rust Part 2: The Roots of the Problem
Allocators
This section gives an overview and implementation detail of allocating blocks of memory.
What this is not: a custom allocator to replace the global Rust allocator
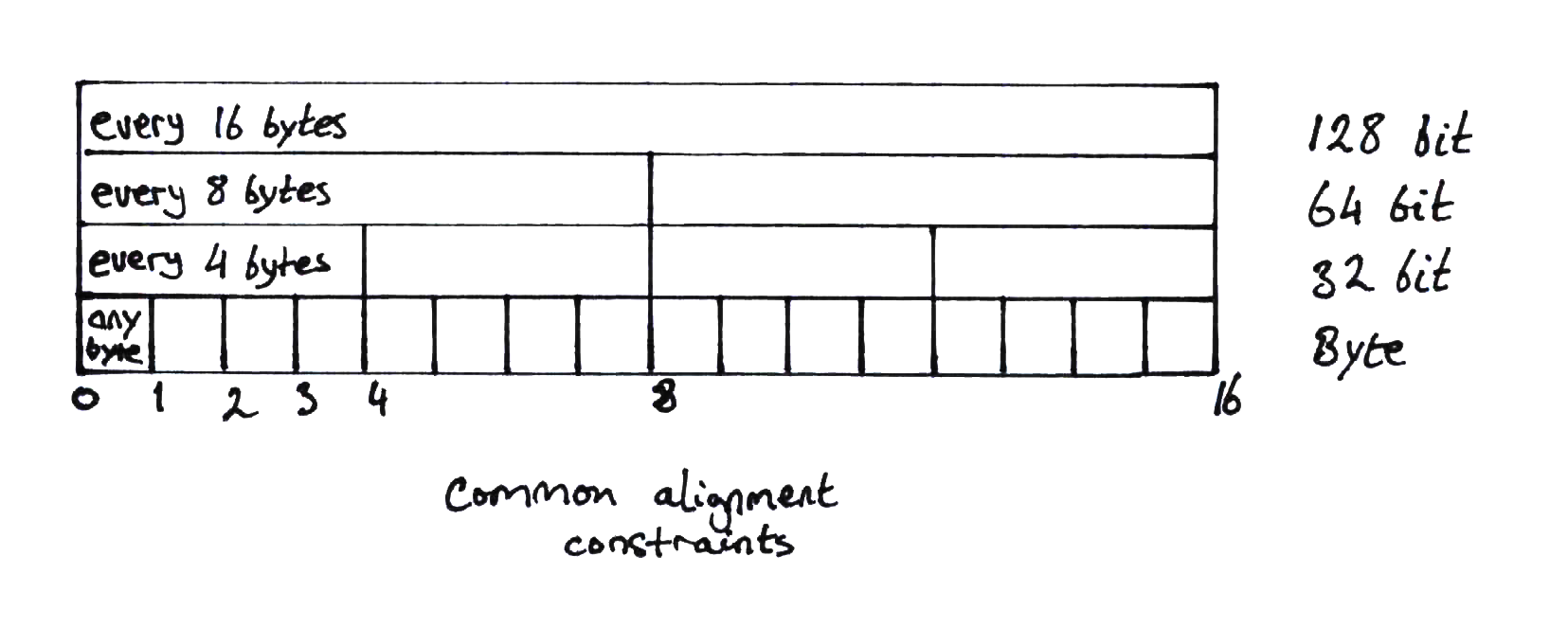
Alignment
There are subtleties in memory access alignment:
- Some hardware architectures and implementations may fault on unaligned memory access.
- Atomic operations require word-aligned access.
- SIMD operations typically require double-word-aligned access.
- In practice on 64 bit architectures, allocators align objects to 8 byte boundaries for 64 bit objects and smaller and 16 byte boundaries for larger objects for performance optimization and the above reasons.
Intel 32 and 64 bit x86 architectures allow general access to be unaligned but will probably incur an access penalty. The story on 32bit ARM and aarch64 is sufficiently similar but there is a higher chance that an ARM core is configured to raise a bus error on a misaligned access.
Another very important factor is atomic memory operations. Atomic access works on a whole word basis - any unaligned access by nature cannot be guaranteed to be atomic as it will probably involve more than one access. To support atomic operations, alignment must be minmally on word boundaries.
SIMD operations, tending to be 128 bits wide or higher, should be aligned to 16 byte boundaries for optimal code generation and performance. Unaligned loads and stores may be allowed but normally these incur performance penalties.
While Intel allows unaligned access (that is, alignment on any byte boundary), the recommended (see section 3.6.4) alignment for objects larger than 64 bits is to 16 byte boundaries.
Apparently system malloc() implementations
tend to comply
with the 16 byte boundary.
To verify the above, a rough test of both the system allocator and jemalloc
on x86_64 by using Box::new() on a set of types (u8, u16, u32, u64,
String and a larger struct) confirms a minimum of 8 byte alignment for
anything word size or smaller and 16 byte alignment for everything bigger.
Sample pointer printouts below are for jemalloc but Linux libc malloc produced
the same pattern:
p=0x7fb78b421028 u8
p=0x7fb78b421030 u16
p=0x7fb78b421038 u32
p=0x7fb78b421050 u64
p=0x7fb78b420060 "spam"
p=0x7fb78b4220f0 Hoge { y: 2, z: "ほげ", x: 1 }
Compare with std::mem::align_of<T>() which, on x86_64 for example,
returns alignment values:
u8: 1 byteu16: 2 bytesu32: 4 bytesu64: 8 bytes- any bigger struct: 8
Thus despite the value of std::mem::align_of::<T>(), mature allocators will
do what is most pragmatic and follow recommended practice in support of optimal
performance.
With all that in mind, to keep things simple, we'll align everything to a double-word boundaries. When we add in prepending an object header, the minimum memory required for an object will be two words anyway.
Thus, the allocated size of an object will be calculated1 by
let alignment = size_of::<usize>() * 2;
// mask out the least significant bits that correspond to the alignment - 1
// then add the full alignment
let size = (size_of::<T>() & !(alignment - 1)) + alignment;
For a more detailed explanation of alignment adjustment calculations, see phil-opp's kernel heap allocator.
Obtaining Blocks of Memory
When requesting blocks of memory at a time, one of the questions is what is the desired block alignment?
- In deciding, one factor is that using an alignment that is a multiple of the page size can make it easier to return memory to the operating system.
- Another factor is that if the block is aligned to it's size, it is fast to do bitwise arithmetic on a pointer to an object in a block to compute the block boundary and therefore the location of any block metadata.
With both these in mind we'll look at how to allocate blocks that are aligned to the size of the block.
A basic crate interface
A block of memory is defined as a base address and a size, so we need a struct that contains these elements.
To wrap the base address pointer, we'll use the recommended type for building
collections, std::ptr::NonNull<T>,
which is available on stable.
pub struct Block {
ptr: BlockPtr,
size: BlockSize,
}
Where BlockPtr and BlockSize are defined as:
pub type BlockPtr = NonNull<u8>;
pub type BlockSize = usize;
To obtain a Block, we'll create a Block::new() function which, along with
Block::drop(), is implemented internally by wrapping the stabilized Rust alloc
routines:
pub fn new(size: BlockSize) -> Result<Block, BlockError> {
if !size.is_power_of_two() {
return Err(BlockError::BadRequest);
}
Ok(Block {
ptr: internal::alloc_block(size)?,
size,
})
}
Where parameter size must be a power of two, which is validated on the first
line of the function. Requiring the block size to be a power of two means
simple bit arithmetic can be used to find the beginning and end of a block in
memory, if the block size is always the same.
Errors take one of two forms, an invalid block-size or out-of-memory, both
of which may be returned by Block::new().
#[derive(Debug, PartialEq)]
pub enum BlockError {
/// Usually means requested block size, and therefore alignment, wasn't a
/// power of two
BadRequest,
/// Insufficient memory, couldn't allocate a block
OOM,
}
Now on to the platform-specific implementations.
Custom aligned allocation on stable Rust
On the stable rustc channel we have access to some features of the Alloc API.
This is the ideal option since it abstracts platform specifics for us, we do not need to write different code for Unix and Windows ourselves.
Fortunately there is enough stable functionality to fully implement what we need.
With an appropriate underlying implementation this code should compile and
execute for any target. The allocation function, implemented in the internal
mod, reads:
pub fn alloc_block(size: BlockSize) -> Result<BlockPtr, BlockError> {
unsafe {
let layout = Layout::from_size_align_unchecked(size, size);
let ptr = alloc(layout);
if ptr.is_null() {
Err(BlockError::OOM)
} else {
Ok(NonNull::new_unchecked(ptr))
}
}
}
Once a block has been allocated, there is no safe abstraction at this level
to access the memory. The Block will provide a bare pointer to the beginning
of the memory and it is up to the user to avoid invalid pointer arithmetic
and reading or writing outside of the block boundary.
pub fn as_ptr(&self) -> *const u8 {
self.ptr.as_ptr()
}
Deallocation
Again, using the stable Alloc functions:
pub fn dealloc_block(ptr: BlockPtr, size: BlockSize) {
unsafe {
let layout = Layout::from_size_align_unchecked(size, size);
dealloc(ptr.as_ptr(), layout);
}
}
The implementation of Block::drop() calls the deallocation function
for us so we can create and drop Block instances without leaking memory.
Testing
We want to be sure that the system level allocation APIs do indeed return block-size-aligned blocks. Checking for this is straightforward.
A correctly aligned block should have it's low bits
set to 0 for a number of bits that represents the range of the block
size - that is, the block size minus one. A bitwise XOR will highlight any
bits that shouldn't be set:
// the block address bitwise AND the alignment bits (size - 1) should
// be a mutually exclusive set of bits
let mask = size - 1;
assert!((block.ptr.as_ptr() as usize & mask) ^ mask == mask);
The type of allocation
Before we start writing objects into Blocks, we need to know the nature of
the interface in Rust terms.
If we consider the global allocator in Rust, implicitly available via
Box::new(), Vec::new() and so on, we'll notice that since the global
allocator is available on every thread and allows the creation of new
objects on the heap (that is, mutation of the heap) from any code location
without needing to follow the rules of borrowing and mutable aliasing,
it is essentially a container that implements Sync and the interior
mutability pattern.
We need to follow suit, but we'll leave Sync for advanced chapters.
An interface that satisfies the interior mutability property, by borrowing the allocator instance immutably, might look like:
trait AllocRaw {
fn alloc<T>(&self, object: T) -> *const T;
}
naming it AllocRaw because when layering on top of Block we'll
work with raw pointers and not concern ourselves with the lifetime of
allocated objects.
It will become a little more complex than this but for now, this captures the essence of the interface.
An allocator: Sticky Immix
Quickly, some terminology:
- Mutator: the thread of execution that writes and modifies objects on the heap.
- Live objects: the graph of objects that the mutator can reach, either directly from it's stack or indirectly through other reachable objects.
- Dead objects: any object that is disconnected from the mutator's graph of live objects.
- Collector: the thread of execution that identifies objects that are no longer reachable by the mutator and marks them as free space that can be reused
- Fragmentation: as objects have many different sizes, after allocating and freeing many objects, gaps of unused memory appear between objects that are too small for most objects but that add up to a measurable percentage of wasted space.
- Evacuation: when the collector moves live objects to another block of memory so that the originating block can be de_fragmented
About Immix
Immix is a memory management scheme that considers blocks of fixed size at a time. Each block is divided into lines. In the original paper, blocks are sized at 32k and lines at 128 bytes. Objects are allocated into blocks using bump allocation and objects can cross line boundaries.
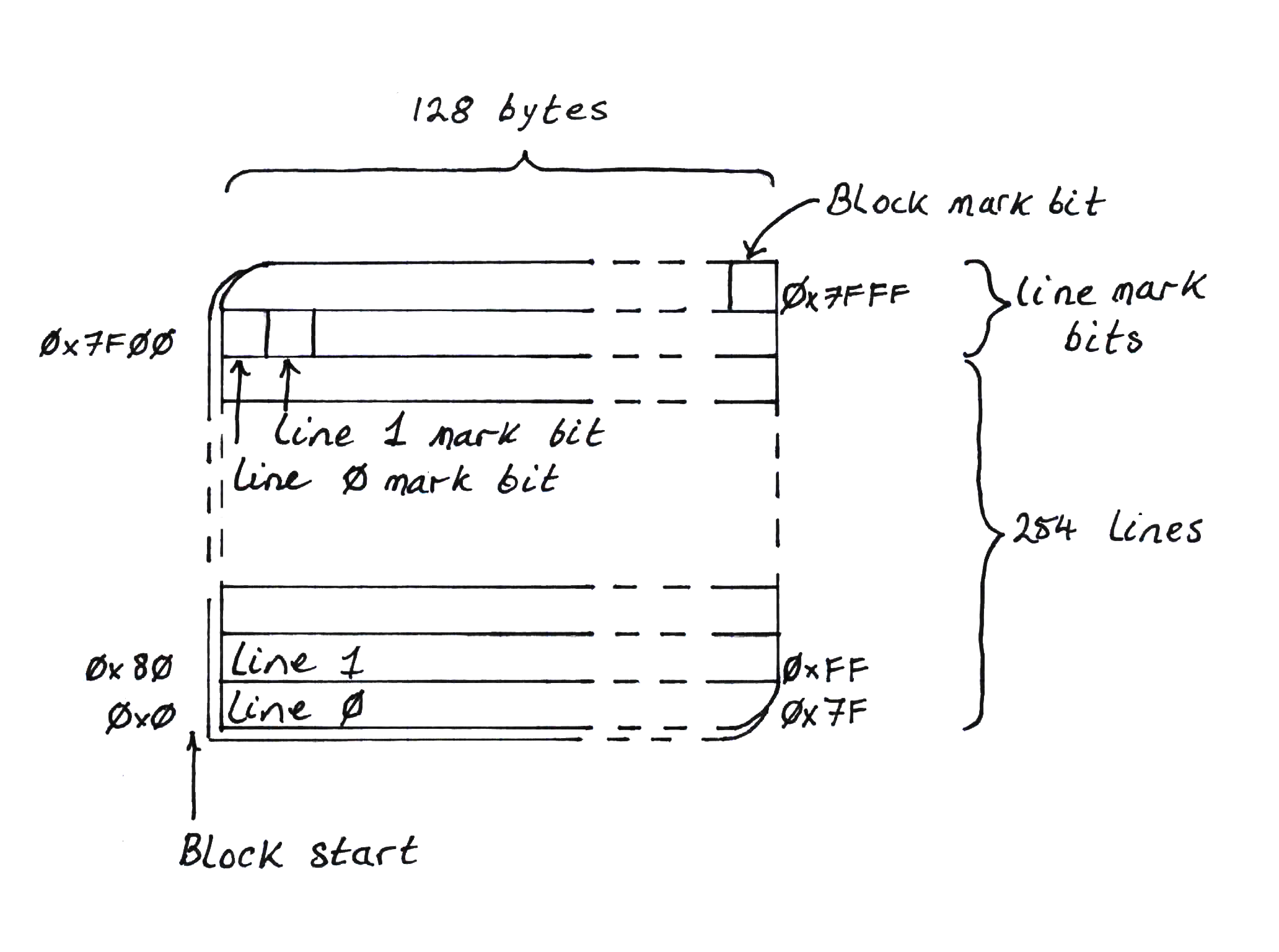
During tracing to discover live objects, objects are marked as live, but the line, or lines, that each object occupies are also marked as live. This can mean, of course, that a line may contain a dead object and a live object but the whole line is marked as live.
To mark lines as live, a portion of the block is set aside for line mark bits, usually one byte per mark bit. If any line is marked as live, the whole block is also marked as live. There must also, therefore, be a bit that indicates block liveness.
Conservative marking
The Immix authors found that marking every line that contains a live object could be expensive. For example, many small objects might cross line boundaries, requiring two lines to be marked as live. This would require looking up the object size and calculating whether the object crosses the boundary into the next line. To save CPU cycles, they simplified the algorithm by saying that any object that fits in a line might cross into the next line so we will conservatively consider the next line marked just in case. This sped up marking at little fragmentation expense.
Collection
During collection, only lines not marked as live are considered available for re-use. Inevitably then, there is acceptance of some amount of fragmentation at this point.
Full Immix implements evacuating objects out of the most fragmented blocks into fresh, empty blocks, for defragmentation.
For simplicity of implementation, we'll leave out this evacuation operation in this guide. This is called Sticky Immix.
We'll also stick to a single thread for the mutator and collector to avoid the complexity overhead of a multi-threaded implementation for now.
Recommended reading: Stephen M. Blackburn & Kathryn S. McKinley - Immix: A Mark-Region Garbage Collector with Space Efficiency, Fast Collection, and Mutator Performance
About this part of the book
This section will describe a Rust crate that implements a Sticky Immix heap. As part of this implementation we will dive into the crate API details to understand how we can define an interface between the heap and the language VM that will come later.
What this is not: custom memory management to replace the global Rust allocator! The APIs we arrive at will be substantially incompatible with the global Rust allocator.
Bump allocation
Now that we can get blocks of raw memory, we need to write objects into it. The simplest way to do this is to write objects into a block one after the other in consecutive order. This is bump allocation - we have a pointer, the bump pointer, which points at the space in the block after the last object that was written. When the next object is written, the bump pointer is incremented to point to the space after that object.
In a twist of mathematical convenience, though, it is more efficient to bump allocate from a high memory location downwards. We will do that.
We will used a fixed power-of-two block size. The benefit of this is that given a pointer to an object, by zeroing the bits of the pointer that represent the block size, the result points to the beginning of the block. This will be useful later when implementing garbage collection.
Our block size will be 32k, a reasonably optimal size arrived at in the original Immix paper. This size can be any power of two though and different use cases may show different optimal sizes.
pub const BLOCK_SIZE_BITS: usize = 15;
pub const BLOCK_SIZE: usize = 1 << BLOCK_SIZE_BITS;
Now we'll define a struct that wraps the block with a bump pointer and garbage collection metadata:
pub struct BumpBlock {
cursor: *const u8,
limit: *const u8,
block: Block,
meta: BlockMeta,
}
Bump allocation basics
In this struct definition, there are two members that we are interested in
to begin with. The other two, limit and meta, will be discussed in the
next section.
cursor: this is the bump pointer. In our implementation it is the index into the block where the last object was written.block: this is theBlockitself in which objects will be written.
Below is a start to a bump allocation function:
impl BumpBlock {
pub fn inner_alloc(&mut self, alloc_size: usize) -> Option<*const u8> {
let block_start_ptr = self.block.as_ptr() as usize;
let cursor_ptr = self.cursor as usize;
// align to word boundary
let align_mask = usize = !(size_of::<usize>() - 1);
let next_ptr = cursor_ptr.checked_sub(alloc_size)? & align_mask;
if next_ptr < block_start_ptr {
// allocation would start lower than block beginning, which means
// there isn't space in the block for this allocation
None
} else {
self.cursor = next_ptr as *const u8;
Some(next_ptr)
}
}
}
In our function, the alloc_size parameter should be a number of bytes of
memory requested.
The value of alloc_size may produce an unaligned pointer at which to write the
object. Fortunately, by bump allocating downward we can apply a simple mask to the
pointer to align it down to the nearest word:
let align_mask = usize = !(size_of::<usize>() - 1);
In initial implementation, allocation will simply return None if the block
does not have enough capacity for the requested alloc_size. If there is
space, it will be returned as a Some(*const u8) pointer.
Note that this function does not write the object to memory, it merely
returns a pointer to an available space. Writing the object will require
invoking the std::ptr::write function. We will do that in a separate module
but for completeness of this chapter, this might look something like:
use std::ptr::write;
unsafe fn write<T>(dest: *const u8, object: T) {
write(dest as *mut T, object);
}
Some time passes...
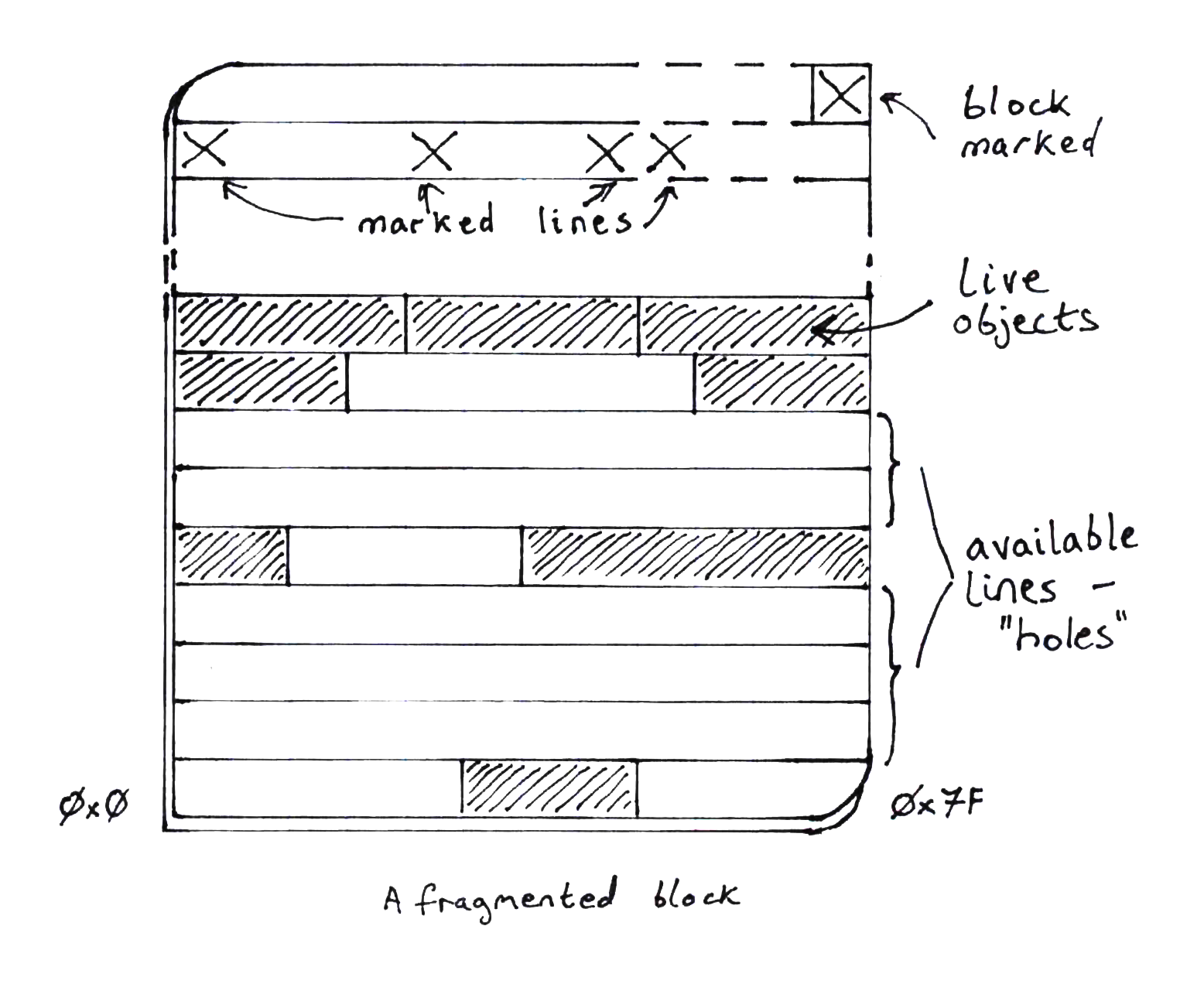
After allocating and freeing objects, we will have gaps between objects in a block that can be reused. The above bump allocation algorithm is unaware of these gaps so we'll have to modify it before it can allocate into fragmented blocks.
To recap, in Immix, a block is divided into lines and only whole lines are considered for reuse. When objects are marked as live, so are the lines that an object occupies. Therefore, only lines that are not marked as live are usable for allocation into. Even if a line is only partially allocated into, it is not a candidate for further allocation.
In our implementation we will use the high bytes of the Block to represent
these line mark bits, where each line is represented by a single byte.
We'll need a data structure to represent this. we'll call it BlockMeta,
but first some constants that we need in order to know
- how big a line is
- how many lines are in a block
- how many bytes remain in the
Blockfor allocating into
pub const LINE_SIZE_BITS: usize = 7;
pub const LINE_SIZE: usize = 1 << LINE_SIZE_BITS;
// How many total lines are in a block
pub const LINE_COUNT: usize = BLOCK_SIZE / LINE_SIZE;
// We need LINE_COUNT number of bytes for marking lines, so the capacity of a block
// is reduced by that number of bytes.
pub const BLOCK_CAPACITY: usize = BLOCK_SIZE - LINE_COUNT;
For clarity, let's put some numbers to the definitions we've made so far:
- A block size is 32Kbytes
- A line is 128 bytes long
- The number of lines within a 32Kbyte
Blockis 256
Therefore the top 256 bytes of a Block are used for line mark bits. Since
these line mark bits do not need to be marked themselves, the last two bytes
of the Block are not needed to mark lines.
This leaves one last thing to mark: the entire Block. If any line in the
Block is marked, then the Block is considered to be live and must be marked
as such.
We use the final byte of the Block to store the Block mark bit.
The definition of BumpBlock contains member meta which is of type
BlockMeta. We can now introduce the definition of BlockMeta which we simply
need to represent a pointer to the line mark section at the end of the Block:
pub struct BlockMeta {
lines: *mut u8,
}
This pointer could be easily calculated, of course, so this is just a handy shortcut.
Allocating into a fragmented Block
The struct BlockMeta contains one function we will study:
/// When it comes to finding allocatable holes, we bump-allocate downward.
pub fn find_next_available_hole(
&self,
starting_at: usize,
alloc_size: usize,
) -> Option<(usize, usize)> {
// The count of consecutive avaliable holes. Must take into account a conservatively marked
// hole at the beginning of the sequence.
let mut count = 0;
let starting_line = starting_at / constants::LINE_SIZE;
let lines_required = (alloc_size + constants::LINE_SIZE - 1) / constants::LINE_SIZE;
// Counting down from the given search start index
let mut end = starting_line;
for index in (0..starting_line).rev() {
let marked = unsafe { *self.lines.add(index) };
if marked == 0 {
// count unmarked lines
count += 1;
if index == 0 && count >= lines_required {
let limit = index * constants::LINE_SIZE;
let cursor = end * constants::LINE_SIZE;
return Some((cursor, limit));
}
} else {
// This block is marked
if count > lines_required {
// But at least 2 previous blocks were not marked. Return the hole, considering the
// immediately preceding block as conservatively marked
let limit = (index + 2) * constants::LINE_SIZE;
let cursor = end * constants::LINE_SIZE;
return Some((cursor, limit));
}
// If this line is marked and we didn't return a new cursor/limit pair by now,
// reset the hole search state
count = 0;
end = index;
}
}
None
}
The purpose of this function is to locate a gap of unmarked lines of sufficient
size to allocate an object of size alloc_size into.
The input to this function, starting_at, is the offset into the block to start
looking for a hole.
If no suitable hole is found, the return value is None.
If there are unmarked lines lower in memory than the starting_at point (bump
allocating downwards), the return value will be a pair of numbers: (cursor, limit) where:
cursorwill be the new bump pointer valuelimitwill be the lower bound of the available hole.
A deeper dive
Our first variable is a counter of consecutive available lines. This count will always assume that the first line in the sequence is conservatively marked and won't count toward the total, unless it is line 0.
let mut count = 0;
Next, the starting_at and alloc_size arguments have units of bytes but we
want to use line count math, so conversion must be done.
let starting_line = starting_at / constants::LINE_SIZE;
let lines_required = (alloc_size + constants::LINE_SIZE - 1) / constants::LINE_SIZE;
Our final variable will be the end line that, together with starting_line,
will mark the boundary of the hole we hope to find.
let mut end = starting_line;
Now for the loop that identifies holes and ends the function if either:
- a large enough hole is found
- no suitable hole is found
We iterate over lines in decreasing order from starting_line down to line zero
and fetch the mark bit into variable marked.
for index in (0..starting_line).rev() {
let marked = unsafe { *self.lines.add(index) };
If the line is unmarked, we increment our consecutive-unmarked-lines counter.
Then we reach the first termination condition: we reached line zero and we have a large enough hole for our object. The hole extents can be returned, converting back to byte offsets.
if marked == 0 {
count += 1;
if index == 0 && count >= lines_required {
let limit = index * constants::LINE_SIZE;
let cursor = end * constants::LINE_SIZE;
return Some((cursor, limit));
}
} else {
Otherwise if the line is marked, we've reached the end of the current hole (if we were even over one.)
Here, we have the second possible termination condition: we have a large enough hole for our object. The hole extents can be returned, taking the last line as conservatively marked.
This is seen in adding 2 to index:
- 1 for walking back from the current marked line
- plus 1 for walking back from the previous conservatively marked line
If this condition isn't met, our search is reset - count is back to zero and
we keep iterating.
} else {
if count > lines_required {
let limit = (index + 2) * constants::LINE_SIZE;
let cursor = end * constants::LINE_SIZE;
return Some((cursor, limit));
}
count = 0;
end = index;
}
Finally, if iterating over lines reached line zero without finding a hole, we
return None to indicate failure.
}
None
}
Making use of the hole finder
We'll return to the BumpBlock::inner_alloc() function now to make use of
BlockMeta and its hole finding operation.
The BumpBlock struct contains two more members: limit and meta. These
should now be obvious - limit is the known byte offset limit into which
we can allocate, and meta is the BlockMeta instance associated with the
block.
We need to update inner_alloc() with a new condition:
- the size being requested must fit between
self.cursorandself.limit
(Note that for a fresh, new block, self.limit is set to the block size.)
If the above condition is not met, we will call
BlockMeta::find_next_available_hole() to get a new cursor and limit
to try, and repeat that until we've either found a big enough hole or
reached the end of the block, exhausting our options.
The new definition of BumpBlock::inner_alloc() reads as follows:
pub fn inner_alloc(&mut self, alloc_size: usize) -> Option<*const u8> {
let ptr = self.cursor as usize;
let limit = self.limit as usize;
let next_ptr = ptr.checked_sub(alloc_size)? & constants::ALLOC_ALIGN_MASK;
if next_ptr < limit {
let block_relative_limit =
unsafe { self.limit.sub(self.block.as_ptr() as usize) } as usize;
if block_relative_limit > 0 {
if let Some((cursor, limit)) = self
.meta
.find_next_available_hole(block_relative_limit, alloc_size)
{
self.cursor = unsafe { self.block.as_ptr().add(cursor) };
self.limit = unsafe { self.block.as_ptr().add(limit) };
return self.inner_alloc(alloc_size);
}
}
None
} else {
self.cursor = next_ptr as *const u8;
Some(self.cursor)
}
}
and as you can see, this implementation is recursive.
Wrapping this up
At the beginning of this chapter we stated that given a pointer to an object, by zeroing the bits of the pointer that represent the block size, the result points to the beginning of the block.
We'll make use of that now.
During the mark phase of garbage collection, we will need to know which line or
lines to mark, in addition to marking the object itself. We will make a copy of
the BlockMeta instance pointer in the 0th word of the memory block so that
given any object pointer, we can obtain the BlockMeta instance.
In the next chapter we'll handle multiple BumpBlocks so that we can keep
allocating objects after one block is full.
Allocating into Multiple Blocks
Let's now zoom out of the fractal code soup one level and begin arranging multiple blocks so we can allocate - in theory - indefinitely.
Lists of blocks
We'll need a new struct for wrapping multiple blocks:
struct BlockList {
head: Option<BumpBlock>,
overflow: Option<BumpBlock>,
rest: Vec<BumpBlock>,
}
Immix maintains several lists of blocks. We won't include them all in the first iteration but in short they are:
free: a list of blocks that contain no objects. These blocks are held at the ready to allocate into on demandrecycle: a list of blocks that contain some objects but also at least one line that can be allocated intolarge: not a list of blocks, necessarily, but a list of objects larger than the block size, or some other method of accounting for large objectsrest: the rest of the blocks that have been allocated into but are not suitable for recycling
In our first iteration we'll only keep the rest list of blocks and two blocks
to immediately allocate into. Why two? To understand why, we need to understand
how Immix thinks about object sizes.
Immix and object sizes
We've seen that there are two numbers that define granularity in Immix: the block size and the line size. These numbers give us the ability to categorize object sizes:
- small: those that (with object header and alignment overhead) fit inside a line
- medium: those that (again with object header and alignment overhead) are larger than one line but smaller than a block
- large: those that are larger than a block
In the previous chapter we described the basic allocation algorithm: when an object is being allocated, the current block is scanned for a hole between marked lines large enough to allocate into. This does seem like it could be inefficient. We could spend a lot of CPU cycles looking for a big enough hole, especially for a medium sized object.
To avoid this, Immix maintains a second block, an overflow block, to allocate medium objects into that don't fit the first available hole in the main block being allocated into.
Thus two blocks to immediately allocate into:
head: the current block being allocated intooverflow: a block kept handy for writing medium objects into that don't fit theheadblock's current hole
We'll be ignoring large objects for now and attending only to allocating small and medium objects into blocks.
Instead of recycling blocks with holes, or maintaining a list of pre-allocated free blocks, we'll allocate a new block on demand whenever we need more space. We'll get to identifying holes and recyclable blocks in a later chapter.
Managing the overflow block
Generally in our code for this book, we will try to default to not allocating memory unless it is needed. For example, when an array is instantiated, the backing storage will remain unallocated until a value is pushed on to it.
Thus in the definition of BlockList, head and overflow are Option
types and won't be instantiated except on demand.
For allocating into the overflow block we'll define a function in the
BlockList impl:
impl BlockList {
fn overflow_alloc(&mut self, alloc_size: usize) -> Result<*const u8, AllocError> {
...
}
}
The input constraint is that, since overflow is for medium objects, alloc_size
must be less than the block size.
The logic inside will divide into three branches:
- We haven't got an overflow block yet -
self.overflowisNone. In this case we have to instantiate a new block (since we're not maintaining a list of preinstantiated free blocks yet) and then, since that block is empty and we have a medium sized object, we can expect the allocation to succeed.match self.overflow { Some ..., None => { let mut overflow = BumpBlock::new()?; // object size < block size means we can't fail this expect let space = overflow .inner_alloc(alloc_size) .expect("We expected this object to fit!"); self.overflow = Some(overflow); space } } - We have an overflow block and the object fits. Easy.
match self.overflow { // We already have an overflow block to try to use... Some(ref mut overflow) => { // This is a medium object that might fit in the current block... match overflow.inner_alloc(alloc_size) { // the block has a suitable hole Some(space) => space, ... } }, None => ... } - We have an overflow block but the object does not fit. Now we simply
instantiate a new overflow block, adding the old one to the
restlist (in future it will make a good candidate for recycing!). Again, since we're writing a medium object into a block, we can expect allocation to succeed.match self.overflow { // We already have an overflow block to try to use... Some(ref mut overflow) => { // This is a medium object that might fit in the current block... match overflow.inner_alloc(alloc_size) { Some ..., // the block does not have a suitable hole None => { let previous = replace(overflow, BumpBlock::new()?); self.rest.push(previous); overflow.inner_alloc(alloc_size).expect("Unexpected error!") } } }, None => ... }
In this logic, the only error can come from failing to create a new block.
On success, at this level of interface we continue to return a *const u8
pointer to the available space as we're not yet handling the type of the
object being allocated.
You may have noticed that the function signature for overflow_alloc takes a
&mut self. This isn't compatible with the interior mutability model
of allocation. We'll have to wrap the BlockList struct in another struct
that handles this change of API model.
The heap struct
This outer struct will provide the external crate interface and some further implementation of block management.
The crate interface will require us to consider object headers and so in the
struct definition below there is reference to a generic type H that
the user of the heap will define as the object header.
pub struct StickyImmixHeap<H> {
blocks: UnsafeCell<BlockList>,
_header_type: PhantomData<*const H>,
}
Since object headers are not owned directly by the heap struct, we need a
PhantomData instance to associate with H. We'll discuss object headers
in a later chapter.
Now let's focus on the use of the BlockList.
The instance of BlockList in the StickyImmixHeap struct is wrapped in an
UnsafeCell because we need interior mutability. We need to be able to
borrow the BlockList mutably while presenting an immutable interface to
the outside world. Since we won't be borrowing the BlockList in multiple
places in the same call tree, we don't need RefCell and we can avoid it's
runtime borrow checking.
Allocating into the head block
We've already taken care of the overflow block, now we'll handle allocation
into the head block. We'll define a new function:
impl StickyImmixHeap {
fn find_space(
&self,
alloc_size: usize,
size_class: SizeClass,
) -> Result<*const u8, AllocError> {
let blocks = unsafe { &mut *self.blocks.get() };
...
}
}
This function is going to look almost identical to the alloc_overflow()
function defined earlier. It has more or less the same cases to walk through:
headblock isNone, i.e. we haven't allocated a head block yet. Allocate one and write the object into it.- We have
Some(ref mut head)inhead. At this point we divert from thealloc_overflow()function and query the size of the object - if this is is a medium object and the current hole between marked lines in theheadblock is too small, call intoalloc_overflow()and return.
Otherwise, continue to allocate intoif size_class == SizeClass::Medium && alloc_size > head.current_hole_size() { return blocks.overflow_alloc(alloc_size); }headand return. - We have
Some(ref mut head)inheadbut this block is unable to accommodate the object, whether medium or small. We must append the current head to therestlist and create a newBumpBlockto allocate into.
There is one more thing to mention. What about large objects? We'll cover those
in a later chapter. Right now we'll make it an error to try to allocate a large
object by putting this at the beginning of the StickyImmixHeap::inner_alloc()
function:
if size_class == SizeClass::Large {
return Err(AllocError::BadRequest);
}
Where to next?
We have a scheme for finding space in blocks for small and medium objects and so, in the next chapter we will define the external interface to the crate.
Defining the allocation API
Let's look back at the allocator prototype API we defined in the introductory chapter.
trait AllocRaw {
fn alloc<T>(&self, object: T) -> *const T;
}
This will quickly prove to be inadequate and non-idiomatic. For starters, there is no way to report that allocation failed except for perhaps returning a null pointer. That is certainly a workable solution but is not going to feel idiomatic or ergonomic for how we want to use the API. Let's make a couple changes:
trait AllocRaw {
fn alloc<T>(&self, object: T) -> Result<RawPtr<T>, AllocError>;
}
Now we're returning a Result, the failure side of which is an error type
where we can distinguish between different allocation failure modes. This is
often not that useful but working with Result is far more idiomatic Rust
than checking a pointer for being null. We'll allow for distinguishing between
Out Of Memory and an allocation request that for whatever reason is invalid.
#[derive(Copy, Clone, Debug, PartialEq)]
pub enum AllocError {
/// Some attribute of the allocation, most likely the size requested,
/// could not be fulfilled
BadRequest,
/// Out of memory - allocating the space failed
OOM,
}
The second change is that instead of a *const T value in the success
discriminant we'll wrap a pointer in a new struct: RawPtr<T>. This wrapper
will amount to little more than containing a std::ptr::NonNull instance
and some functions to access the pointer.
pub struct RawPtr<T: Sized> {
ptr: NonNull<T>,
}
This'll be better to work with on the user-of-the-crate side.
It'll also make it easier to modify internals or even swap out entire implementations. This is a motivating factor for the design of this interface as we'll see as we continue to amend it to account for object headers now.
Object headers
The purpose of an object header is to provide the allocator, the language runtime and the garbage collector with information about the object that is needed at runtime. Typical data points that are stored might include:
- object size
- some kind of type identifier
- garbage collection information such as a mark flag
We want to create a flexible interface to a language while also ensuring that the interpreter will provide the information that the allocator and garbage collector in this crate need.
We'll define a trait for the user to implement.
pub trait AllocHeader: Sized {
/// Associated type that identifies the allocated object type
type TypeId: AllocTypeId;
/// Create a new header for object type O
fn new<O: AllocObject<Self::TypeId>>(size: u32, size_class: SizeClass, mark: Mark) -> Self;
/// Create a new header for an array type
fn new_array(size: ArraySize, size_class: SizeClass, mark: Mark) -> Self;
/// Set the Mark value to "marked"
fn mark(&mut self, value: Mark);
/// Get the current Mark value
fn mark_is(&self, value: Mark) -> bool;
/// Get the size class of the object
fn size_class(&self) -> SizeClass;
/// Get the size of the object in bytes
fn size(&self) -> u32;
/// Get the type of the object
fn type_id(&self) -> Self::TypeId;
}
Now we have a bunch more questions to answer! Some of these trait methods are
straightforward - fn size(&self) -> u32 returns the object size; mark()
and is_marked() must be GC related. Some are less obvious, such as
new_array() which we'll cover at the end of this chapter.
But this struct references some more types that must be defined and explained.
Type identification
What follows is a set of design trade-offs made for the purposes of this book; there are many ways this could be implemented.
The types described next are all about sharing compile-time and runtime object type information between the allocator, the GC and the interpreter.
We ideally want to make it difficult for the user to make mistakes with this and leak undefined behavior. We would also prefer this to be a safe-Rust interface, while at the same time being flexible enough for the user to make interpreter-appropriate decisions about the header design.
First up, an object header implementation must define an associated type
pub trait AllocHeader: Sized {
type TypeId: AllocTypeId;
}
where AllocTypeId is define simply as:
pub trait AllocTypeId: Copy + Clone {}
This means the interpreter is free to implement a type identifier type however it pleases, the only constraint is that it implements this trait.
Next, the definition of the header constructor,
pub trait AllocHeader: Sized {
...
fn new<O: AllocObject<Self::TypeId>>(
size: u32,
size_class: SizeClass,
mark: Mark
) -> Self;
...
}
refers to a type O that must implement AllocObject which in turn must refer
to the common AllocTypeId. The generic type O is the object for which the
header is being instantiated for.
And what is AllocObject? Simply:
pub trait AllocObject<T: AllocTypeId> {
const TYPE_ID: T;
}
In summary, we have:
AllocHeader: a trait that the header type must implementAllocTypeId: a trait that a type identifier must implementAllocObject: a trait that objects that can be allocated must implement
An example
Let's implement a couple of traits to make it more concrete.
The simplest form of type identifier is an enum. Each discriminant describes a type that the interpreter will use at runtime.
#[derive(PartialEq, Copy, Clone)]
enum MyTypeId {
Number,
String,
Array,
}
impl AllocTypeId for MyTypeId {}
A hypothetical numeric type for our interpreter with the type identifier as associated constant:
struct BigNumber {
value: i64
}
impl AllocObject<MyTypeId> for BigNumber {
const TYPE_ID: MyTypeId = MyTypeId::Number;
}
And finally, here is a possible object header struct and the implementation of
AllocHeader::new():
struct MyHeader {
size: u32,
size_class: SizeClass,
mark: Mark,
type_id: MyTypeId,
}
impl AllocHeader for MyHeader {
type TypeId = MyTypeId;
fn new<O: AllocObject<Self::TypeId>>(
size: u32,
size_class: SizeClass,
mark: Mark
) -> Self {
MyHeader {
size,
size_class,
mark,
type_id: O::TYPE_ID,
}
}
...
}
These would all be defined and implemented in the interpreter and are not
provided by the Sticky Immix crate, while all the functions in the trait
AllocHeader are intended to be called internally by the allocator itself,
not on the interpreter side.
The types SizeClass and Mark are provided by this crate and are enums.
The one drawback to this scheme is that it's possible to associate an incorrect type id constant with an object. This would result in objects being misidentified at runtime and accessed incorrectly, likely leading to panics.
Fortunately, this kind of trait implementation boilerplate is ideal for derive macros. Since the language side will be implementing these structs and traits, we'll defer until the relevant interpreter chapter to go over that.
Back to AllocRaw
Now that we have some object and header definitions and constraints, we need to
apply them to the AllocRaw API. We can't allocate an object unless it
implements AllocObject and has an associated constant that implements
AllocTypeId. We also need to expand the interface with functions that the
interpreter can use to reliably get the header for an object and the object
for a header.
We will add an associated type to tie the allocator API to the header type and indirectly to the type identification that will be used.
pub trait AllocRaw {
type Header: AllocHeader;
...
}
Then we can update the alloc() function definition to constrain the types
that can be allocated to only those that implement the appropriate traits.
pub trait AllocRaw {
...
fn alloc<T>(&self, object: T) -> Result<RawPtr<T>, AllocError>
where
T: AllocObject<<Self::Header as AllocHeader>::TypeId>;
...
}
We need the user and the garbage collector to be able to access the header, so we need a function that will return the header given an object pointer.
The garbage collector does not know about concrete types, it will need to be able to get the header without knowing the object type. It's likely that the interpreter will, at times, also not know the type at runtime.
Indeed, one of the functions of an object header is to, at runtime, given an object pointer, derive the type of the object.
The function signature therefore cannot refer to the type. That is, we can't write
pub trait AllocRaw {
...
// looks good but won't work in all cases
fn get_header<T>(object: RawPtr<T>) -> NonNull<Self::Header>
where
T: AllocObject<<Self::Header as AllocHeader>::TypeId>;
...
}
even though it seems this would be good and right. Instead this function will have to be much simpler:
pub trait AllocRaw {
...
fn get_header(object: NonNull<()>) -> NonNull<Self::Header>;
...
}
We also need a function to get the object from the header:
pub trait AllocRaw {
...
fn get_object(header: NonNull<Self::Header>) -> NonNull<()>;
...
}
These functions are not unsafe but they do return NonNull which implies that
dereferencing the result should be considered unsafe - there is no protection
against passing in garbage and getting garbage out.
Now we have an object allocation function, traits that constrain what can be allocated, allocation header definitions and functions for switching between an object and it's header.
There's one missing piece: we can allocate objects of type T, but
such objects always have compile-time defined size. T is constrained to
Sized types in the RawPtr definition. So how do we allocate dynamically
sized objects, such as arrays?
Dynamically sized types
Since we can allocate objects of type T, and each T must derive
AllocObject and have an associated const of type AllocTypeId, dynamically
sized allocations must fit into this type identification scheme.
Allocating dynamically sized types, or in short, arrays, means there's some ambiguity about the type at compile time as far as the allocator is concerned:
- Are we allocating one object or an array of objects? If we're allocating an array of objects, we'll have to initialize them all. Perhaps we don't want to impose that overhead up front?
- If the allocator knows how many objects compose an array, do we want to bake fat pointers into the interface to carry that number around?
In the same way, then, that the underlying implementation of std::vec::Vec is
backed by an array of u8, we'll do the same. We shall define the return type
of an array allocation to be of type RawPtr<u8> and the size requested to be
in bytes. We'll leave it to the interpreter to build layers on top of this to
handle the above questions.
As the definition of AllocTypeId is up to the interpreter, this crate can't
know the type id of an array. Instead, we will require the interpreter to
implement a function on the AllocHeader trait:
pub trait AllocHeader: Sized {
...
fn new_array(size: ArraySize, size_class: SizeClass, mark: Mark) -> Self;
...
}
This function should return a new object header for an array of u8 with the appropriate type identifier.
We will also add a function to the AllocRaw trait for allocating arrays that
returns the RawPtr<u8> type.
pub trait AllocRaw {
...
fn alloc_array(&self, size_bytes: ArraySize) -> Result<RawPtr<u8>, AllocError>;
...
}
Our complete AllocRaw trait definition now looks like this:
pub trait AllocRaw {
/// An implementation of an object header type
type Header: AllocHeader;
/// Allocate a single object of type T.
fn alloc<T>(&self, object: T) -> Result<RawPtr<T>, AllocError>
where
T: AllocObject<<Self::Header as AllocHeader>::TypeId>;
/// Allocating an array allows the client to put anything in the resulting data
/// block but the type of the memory block will simply be 'Array'. No other
/// type information will be stored in the object header.
/// This is just a special case of alloc<T>() for T=u8 but a count > 1 of u8
/// instances. The caller is responsible for the content of the array.
fn alloc_array(&self, size_bytes: ArraySize) -> Result<RawPtr<u8>, AllocError>;
/// Given a bare pointer to an object, return the expected header address
fn get_header(object: NonNull<()>) -> NonNull<Self::Header>;
/// Given a bare pointer to an object's header, return the expected object address
fn get_object(header: NonNull<Self::Header>) -> NonNull<()>;
}
In the next chapter we'll build out the AllocRaw trait implementation.
Implementing the Allocation API
In this final chapter of the allocation part of the book, we'll cover the
AllocRaw trait implementation.
This trait is implemented on the StickyImmixHeap struct:
impl<H: AllocHeader> AllocRaw for StickyImmixHeap<H> {
type Header = H;
...
}
Here the associated header type is provided as the generic type H, leaving it
up to the interpreter to define.
Allocating objects
The first function to implement is AllocRaw::alloc<T>(). This function must:
- calculate how much space in bytes is required by the object and header
- allocate that space
- instantiate an object header and write it to the first bytes of the space
- copy the object itself to the remaining bytes of the space
- return a pointer to where the object lives in this space
Let's look at the implementation.
impl<H: AllocHeader> AllocRaw for StickyImmixHeap<H> {
fn alloc<T>(&self, object: T) -> Result<RawPtr<T>, AllocError>
where
T: AllocObject<<Self::Header as AllocHeader>::TypeId>,
{
// calculate the total size of the object and it's header
let header_size = size_of::<Self::Header>();
let object_size = size_of::<T>();
let total_size = header_size + object_size;
// round the size to the next word boundary to keep objects aligned and get the size class
// TODO BUG? should this be done separately for header and object?
// If the base allocation address is where the header gets placed, perhaps
// this breaks the double-word alignment object alignment desire?
let size_class = SizeClass::get_for_size(total_size)?;
// attempt to allocate enough space for the header and the object
let space = self.find_space(total_size, size_class)?;
// instantiate an object header for type T, setting the mark bit to "allocated"
let header = Self::Header::new::<T>(object_size as ArraySize, size_class, Mark::Allocated);
// write the header into the front of the allocated space
unsafe {
write(space as *mut Self::Header, header);
}
// write the object into the allocated space after the header
let object_space = unsafe { space.offset(header_size as isize) };
unsafe {
write(object_space as *mut T, object);
}
// return a pointer to the object in the allocated space
Ok(RawPtr::new(object_space as *const T))
}
}
This, hopefully, is easy enough to follow after the previous chapters -
self.find_space()is the function described in the chapter Allocating into multiple blocksSelf::Header::new()will be implemented by the interpreterwrite(space as *mut Self::Header, header)calls the std functionstd::ptr::write
Allocating arrays
We need a similar (but awkwardly different enough) implementation for array
allocation. The key differences are that the type is fixed to a u8 pointer
and the array is initialized to zero bytes. It is up to the interpreter to
write into the array itself.
impl<H: AllocHeader> AllocRaw for StickyImmixHeap<H> {
fn alloc_array(&self, size_bytes: ArraySize) -> Result<RawPtr<u8>, AllocError> {
// calculate the total size of the array and it's header
let header_size = size_of::<Self::Header>();
let total_size = header_size + size_bytes as usize;
// round the size to the next word boundary to keep objects aligned and get the size class
let size_class = SizeClass::get_for_size(total_size)?;
// attempt to allocate enough space for the header and the array
let space = self.find_space(total_size, size_class)?;
// instantiate an object header for an array, setting the mark bit to "allocated"
let header = Self::Header::new_array(size_bytes, size_class, Mark::Allocated);
// write the header into the front of the allocated space
unsafe {
write(space as *mut Self::Header, header);
}
// calculate where the array will begin after the header
let array_space = unsafe { space.offset(header_size as isize) };
// Initialize object_space to zero here.
// If using the system allocator for any objects (SizeClass::Large, for example),
// the memory may already be zeroed.
let array = unsafe { from_raw_parts_mut(array_space as *mut u8, size_bytes as usize) };
// The compiler should recognize this as optimizable
for byte in array {
*byte = 0;
}
// return a pointer to the array in the allocated space
Ok(RawPtr::new(array_space as *const u8))
}
}
Switching between header and object
As stated in the previous chapter, these functions are essentially pointer operations that do not dereference the pointers. Thus they are not unsafe to call, but the types they operate on should have a suitably unsafe API.
NonNull is the chosen parameter and return type and the pointer arithmetic
for obtaining the header from an object pointer of unknown type is shown
below.
For our Immix implementation, since headers are placed immediately ahead of an object, we simply subtract the header size from the object pointer.
impl<H: AllocHeader> AllocRaw for StickyImmixHeap<H> {
fn get_header(object: NonNull<()>) -> NonNull<Self::Header> {
unsafe { NonNull::new_unchecked(object.cast::<Self::Header>().as_ptr().offset(-1)) }
}
}
Getting the object from a header is the reverse - adding the header size to the header pointer results in the object pointer:
impl<H: AllocHeader> AllocRaw for StickyImmixHeap<H> {
fn get_object(header: NonNull<Self::Header>) -> NonNull<()> {
unsafe { NonNull::new_unchecked(header.as_ptr().offset(1).cast::<()>()) }
}
}
Conclusion
Thus ends the first part of our Immix implementation. In the next part of the book we will jump over the fence to the interpreter and begin using the interfaces we've defined in this part.
An interpreter: Eval-rs
In this part of the book we'll dive into creating:
- a safe Rust layer on top of the Sticky Immix API of the previous part
- a compiler for a primitive s-expression syntax language
- a bytecode based virtual machine
So what kind of interpreter will we implement? This book is a guide to help you along your own journey and not not intended to provide an exhaustive language ecosystem. The direction we'll take is to support John McCarthy's classic s-expression based meta-circular evaluator1.
Along the way we'll need to implement fundamental data types and structures from scratch upon our safe layer - symbols, pairs, arrays and dicts - with each chapter building upon the previous ones.
While this will not result in an exhaustive language implementation, you'll see that we will end up with all the building blocks for you to take it the rest of the way!
We shall name our interpreter "Eval-rs", for which we have an appropriate illustration generously provided by the author's then 10 year old daughter.
We'll begin by defining the safe abstration over the Sticky Immix interface. Then we'll put that to use in parsing s-expressions into a very simple data structure.
Once we've covered those basics, we'll build arrays and dicts and then use those in the compiler and virtual machine.
These days this is cliché but that is substantially to our benefit. We're not trying to create yet another Lisp, rather the fact that there is a preexisting design of some elegance and historical interest is a convenience. For a practical, accessible introduction to the topic, do see Paul Graham's The Roots of Lisp
Allocating objects and dereferencing safely
In this chapter we'll build some safe Rust abstractions over the allocation API defined in the Sticky Immix crate.
Let's first recall this interface:
pub trait AllocRaw {
/// An implementation of an object header type
type Header: AllocHeader;
/// Allocate a single object of type T.
fn alloc<T>(&self, object: T) -> Result<RawPtr<T>, AllocError>
where
T: AllocObject<<Self::Header as AllocHeader>::TypeId>;
/// Allocating an array allows the client to put anything in the resulting data
/// block but the type of the memory block will simply be 'Array'. No other
/// type information will be stored in the object header.
/// This is just a special case of alloc<T>() for T=u8 but a count > 1 of u8
/// instances. The caller is responsible for the content of the array.
fn alloc_array(&self, size_bytes: ArraySize) -> Result<RawPtr<u8>, AllocError>;
/// Given a bare pointer to an object, return the expected header address
fn get_header(object: NonNull<()>) -> NonNull<Self::Header>;
/// Given a bare pointer to an object's header, return the expected object address
fn get_object(header: NonNull<Self::Header>) -> NonNull<()>;
}
These are the functions we'll be calling. When we allocate an object, we'll get
back a RawPtr<T> which has no safe way to dereference it. This is impractical,
we very much do not want to wrap every dereferencing in unsafe { ... }.
We'll need a layer over RawPtr<T> where we can guarantee safe dereferencing.
Pointers
In safe Rust, mutable (&mut) and immutable (&) references are passed around
to access objects. These reference types are compile-time constrained pointers
where the constraints are
- the mutability of the access
- the lifetime of the access
For our layer over RawPtr<T> we'll have to consider both these constraints.
Mutability
This constraint is concerned with shared access to an object. In other words, it cares about how many pointers there are to an object at any time and whether they allow mutable or immutable access.
The short of it is:
- Either only one
&mutreference may be held in a scope - Or many
&immutable references may be held in a scope
The compiler must be able to determine that a &mut reference is the only
live reference in it's scope that points at an object in order
for mutable access to that object to be safe of data races.
In a runtime memory managed language such as the interpreter we are building, we will not have compile time knowledge of shared access to objects. We won't know at compile time how many pointers to an object we may have at any time. This is the normal state of things in languages such as Python, Ruby or Javascript.
This means that we can't allow &mut references in our safe layer at all!
If we're restricted to & immutable references everywhere, that then means
we must apply the interior mutability pattern everywhere in our design in
order to comply with the laws of safe Rust.
Lifetime
The second aspect to references is their lifetime. This concerns the duration of the reference, from inception until it goes out of scope.
The key concept to think about now is "scope."
In an interpreted language there are two major operations on the objects in memory:
fn run_mutator() {
parse_source_code();
compile();
execute_bytecode();
}
and
fn run_garbage_collection() {
trace_objects();
free_dead_objects();
}
A few paragraphs earlier we determined that we can't have &mut references
to objects in our interpreter.
By extension, we can't safely hold a mutable reference to the entire heap as a data structure.
Except, that is exactly what garbage collection requires. The nature of
garbage collection is that it views the entire heap as a single data structure
in it's own right that it needs to traverse and modify. It wants the
heap to be &mut.
Consider, especially, that some garbage collectors move objects, so that pointers to moved objects, wherever they may be, must be modified by the garbage collector without breaking the mutator! The garbage collector must be able to reliably discover every single pointer to moved objects to avoid leaving invalid pointers scattered around1.
Thus we have two mutually exclusive interface requirements, one that must
only hold & object references and applies interior mutability to the heap
and the other that wants the whole heap to be &mut.
For this part of the book, we'll focus on the use of the allocator and save garbage collection for a later part.
This mutual exclusivity constraint on the allocator results in the statements:
- When garbage collection is running, it is not safe to run the mutator2
- When garbage collection is not running, it is safe to run the mutator
Thus our abstraction must encapsulate a concept of a time when "it is safe to run the mutator" and since we're working with safe Rust, this must be a compile time concept.
Scopes and lifetimes are perfect for this abstraction. What we'll need is some way to define a lifetime (that is, a scope) within which access to the heap by the mutator is safe.
Some pointer types
First, let's define a simple pointer type that can wrap an allocated type T
in a lifetime:
pub struct ScopedPtr<'guard, T: Sized> {
value: &'guard T,
}
This type will implement Clone, Copy and Deref - it can be passed around
freely within the scope and safely dereferenced.
As you can see we have a lifetime 'guard that we'll use to restrict the
scope in which this pointer can be accessed. We need a mechanism to restrict
this scope.
The guard pattern is what we'll use, if the hint wasn't strong enough.
We'll construct some types that ensure that safe pointers such as
ScopedPtr<T>, and access to the heap at in any way, are mediated by an
instance of a guard type that can provide access.
We will end up passing a reference to the guard instance around everywhere. In most cases we won't care about the instance type itself so much as the lifetime that it carries with it. As such, we'll define a trait for this type to implement that so that we can refer to the guard instance by this trait rather than having to know the concrete type. This'll also allow other types to proxy the main scope-guarding instance.
pub trait MutatorScope {}
You may have noticed that we've jumped from RawPtr<T> to ScopedPtr<T> with
seemingly nothing to bridge the gap. How do we get a ScopedPtr<T>?
We'll create a wrapper around RawPtr<T> that will complete the picture. This
wrapper type is what will hold pointers at rest inside any data structures.
#[derive(Clone)]
pub struct CellPtr<T: Sized> {
inner: Cell<RawPtr<T>>,
}
This is straightforwardly a RawPtr<T> in a Cell to allow for modifying the
pointer. We won't allow dereferencing from this type either though.
Remember that dereferencing a heap object pointer is only safe when we are
in the right scope? We need to create a ScopedPtr<T> from a CellPtr<T>
to be able to use it.
First we'll add a helper function to RawPtr<T> in our interpreter crate so
we can safely dereference a RawPtr<T>. This code says that, given an instance
of a MutatorScope-implementing type, give me back a reference type with
the same lifetime as the guard that I can safely use. Since the _guard
parameter is never used except to define a lifetime, it should be optimized
out by the compiler!
pub trait ScopedRef<T> {
fn scoped_ref<'scope>(&self, guard: &'scope dyn MutatorScope) -> &'scope T;
}
impl<T> ScopedRef<T> for RawPtr<T> {
fn scoped_ref<'scope>(&self, _guard: &'scope dyn MutatorScope) -> &'scope T {
unsafe { &*self.as_ptr() }
}
}
We'll use this in our CellPtr<T> to obtain a ScopedPtr<T>:
impl<T: Sized> CellPtr<T> {
pub fn get<'guard>(&self, guard: &'guard dyn MutatorScope) -> ScopedPtr<'guard, T> {
ScopedPtr::new(guard, self.inner.get().scoped_ref(guard))
}
}
Thus, anywhere (structs, enums) that needs to store a pointer to something on
the heap will use CellPtr<T> and any code that accesses these pointers
during the scope-guarded mutator code will obtain ScopedPtr<T> instances
that can be safely dereferenced.
The heap and the mutator
The next question is: where do we get an instance of MutatorScope from?
The lifetime of an instance of a MutatorScope will define the lifetime
of any safe object accesses. By following the guard pattern, we will find
we have:
- a heap struct that contains an instance of the Sticky Immix heap
- a guard struct that proxies the heap struct for the duration of a scope
- a mechanism to enforce the scope limit
A heap struct
Let's make a type alias for the Sticky Immix heap so we aren't referring to it as such throughout the interpreter:
pub type HeapStorage = StickyImmixHeap<ObjectHeader>;
The let's put that into a heap struct, along with any other interpreter-global storage:
struct Heap {
heap: HeapStorage,
syms: SymbolMap,
}
We'll discuss the SymbolMap type in the next chapter.
Now, since we've wrapped the Sticky Immix heap in our own Heap struct,
we'll need to impl an alloc() method to proxy the Sticky Immix
allocation function.
impl Heap {
fn alloc<T>(&self, object: T) -> Result<RawPtr<T>, RuntimeError>
where
T: AllocObject<TypeList>,
{
Ok(self.heap.alloc(object)?)
}
}
A couple things to note about this function:
- It returns
RuntimeErrorin the error case, this type convertsFromthe Sticky Immix crate's error type. - The
whereconstraint is similar to that ofAllocRaw::alloc()but in now we have a concreteTypeListtype to bind to. We'll look atTypeListin the next chapter along withSymbolMap.
A guard struct
This next struct will be used as a scope-limited proxy for the Heap struct
with one major difference: function return types will no longer be RawPtr<T>
but ScopedPtr<T>.
pub struct MutatorView<'memory> {
heap: &'memory Heap,
}
Here in this struct definition, it becomes clear that all we are doing is
borrowing the Heap instance for a limited lifetime. Thus, the lifetime of
the MutatorView instance will be the lifetime that all safe object
access is constrained to.
A look at the alloc() function now:
impl<'memory> MutatorView<'memory> {
pub fn alloc<T>(&self, object: T) -> Result<ScopedPtr<'_, T>, RuntimeError>
where
T: AllocObject<TypeList>,
{
Ok(ScopedPtr::new(
self,
self.heap.alloc(object)?.scoped_ref(self),
))
}
}
Very similar to Heap::alloc() but the return type is now a ScopedPtr<T>
whose lifetime is the same as the MutatorView instance.
Enforcing a scope limit
We now have a Heap and a guard, MutatorView, but we want one more thing:
to prevent an instance of MutatorView from being returned from anywhere -
that is, enforcing a scope within which an instance of MutatorView will
live and die. This will make it easier to separate mutator operations and
garbage collection operations.
First we'll apply a constraint on how a mutator gains heap access: through a trait.
pub trait Mutator: Sized {
type Input;
type Output;
fn run(&self, mem: &MutatorView, input: Self::Input) -> Result<Self::Output, RuntimeError>;
// TODO
// function to return iterator that iterates over roots
}
If a piece of code wants to access the heap, it must implement this trait!
Secondly, we'll apply another wrapper struct, this time to the Heap type.
This is so that we can borrow the heap member instance.
pub struct Memory {
heap: Heap,
}
This Memory struct and the Mutator trait are now tied together with a
function:
impl Memory {
pub fn mutate<M: Mutator>(&self, m: &M, input: M::Input) -> Result<M::Output, RuntimeError> {
let mut guard = MutatorView::new(self);
m.run(&mut guard, input)
}
}
The key to the scope limitation mechanism is that this mutate function is
the only way to gain access to the heap. It creates an instance of
MutatorView that goes out of scope at the end of the function and thus
can't leak outside of the call stack.
An example
Let's construct a simple example to demonstrate these many parts. This
will omit defining a TypeId and any other types that we didn't discuss
above.
struct Stack {}
impl Stack {
fn say_hello(&self) {
println!("I'm the stack!");
}
}
struct Roots {
stack: CellPtr<Stack>
}
impl Roots {
fn new(stack: ScopedPtr<'_, Stack>) -> Roots {
Roots {
stack: CellPtr::new_with(stack)
}
}
}
struct Interpreter {}
impl Mutator for Interpreter {
type Input: ();
type Output: Roots;
fn run(&self, mem: &MutatorView, input: Self::Input) -> Result<Self::Output, RuntimeError> {
let stack = mem.alloc(Stack {})?; // returns a ScopedPtr<'_, Stack>
stack.say_hello();
let roots = Roots::new(stack);
let stack_ptr = roots.stack.get(mem); // returns a ScopedPtr<'_, Stack>
stack_ptr.say_hello();
Ok(roots)
}
}
fn main() {
...
let interp = Interpreter {};
let result = memory.mutate(&interp, ());
let roots = result.unwrap();
// no way to do this - compile error
let stack = roots.stack.get();
...
}
In this simple, contrived example, we instantiated a Stack on the heap.
An instance of Roots is created on the native stack and given a pointer
to the Stack instance. The mutator returns the Roots object, which
continues to hold a pointer to a heap object. However, outside of the run()
function, the stack member can't be safely accesed.
Up next: using this framework to implement parsing!
This is the topic of discussion in Felix Klock's series GC and Rust which is recommended reading.
while this distinction exists at the interface level, in reality there are multiple phases in garbage collection and not all of them require exclusive access to the heap. This is an advanced topic that we won't bring into consideration yet.
Tagged pointers and object headers
Since our virtual machine will support a dynamic language where the compiler does no type checking, all the type information will be managed at runtime.
In the previous chapter, we introduced a pointer type ScopedPtr<T>. This
pointer type has compile time knowledge of the type it is pointing at.
We need an alternative to ScopedPtr<T> that can represent all the
runtime-visible types so they can be resolved at runtime.
As we'll see, carrying around type information or looking it up in the header on every access will be inefficient space and performance-wise.
We'll implement a common optimization: tagged pointers.
Runtime type identification
The object header can always give us the type id for an object, given a pointer to the object. However, it requires us to do some arithmetic on the pointer to get the location of the type identifier, then dereference the pointer to get the type id value. This dereference can be expensive if the object being pointed at is not in the CPU cache. Since getting an object type is a very common operation in a dynamic language, these lookups become expensive, time-wise.
Rust itself doesn't have runtime type identification but does have runtime dispatch through trait objects. In this scheme a pointer consists of two words: the pointer to the object itself and a second pointer to the vtable where the concrete object type's methods can be looked up. The generic name for this form of pointer is a fat pointer.
We could easily use a fat pointer type for runtime type identification in our interpreter. Each pointer could carry with it an additional word with the type id in it, or we could even just use trait objects!
A dynamically typed language will manage many pointers that must be type identified at runtime. Carrying around an extra word per pointer is expensive, space-wise, however.
Tagged pointers
Many runtimes implement tagged pointers to avoid the space overhead, while partially improving the time overhead of the header type-id lookup.
In a pointer to any object on the heap, the least most significant bits turn out to always be zero due to word or double-word alignment.
On a 64 bit platform, a pointer is a 64 bit word. Since objects are at least word-aligned, a pointer is always be a multiple of 8 and the 3 least significant bits are always 0. On 32 bit platforms, the 2 least significant bits are always 0.
64..............48..............32..............16...........xxx
0b1111111111111111111111111111111111111111111111111111111111111000
/ |
/ |
unused
When dereferencing a pointer, these bits must always be zero. But we can use them in pointers at rest to store a limited type identifier! We'll limit ourselves to 2 bits of type identifier so as to not complicate our code in distinguishing between 32 and 64 bit platforms1.
Given we'll only have 4 possible types we can id directly from a pointer, we'll still need to fall back on the object header for types that don't fit into this range.
Encoding this in Rust
Flipping bits on a pointer directly definitely constitutes a big Unsafe. We'll
need to make a tagged pointer type that will fundamentally be unsafe because
it won't be safe to dereference it. Then we'll need a safe abstraction over
that type to make it safe to dereference.
But first we need to understand the object header and how we get an object's type from it.
The object header
We introduced the object header traits in the earlier chapter Defining the allocation API. The chapter explained how the object header is the responsibility of the interpreter to implement.
Now that we need to implement type identification, we need the object header.
The allocator API requires that the type identifier implement the
AllocTypeId trait. We'll use an enum to identify for all our runtime types:
#[repr(u16)]
#[derive(Debug, Copy, Clone, PartialEq)]
pub enum TypeList {
ArrayBackingBytes,
ArrayOpcode,
ArrayU8,
ArrayU16,
ArrayU32,
ByteCode,
CallFrameList,
Dict,
Function,
InstructionStream,
List,
NumberObject,
Pair,
Partial,
Symbol,
Text,
Thread,
Upvalue,
}
// Mark this as a Stickyimmix type-identifier type
impl AllocTypeId for TypeList {}
Given that the allocator API requires every object that can be allocated to
have an associated type id const, this enum represents every type that
can be allocated and that we will go on to describe in this book.
It is a member of the ObjectHeader struct along with a few other members
that our Immix implementation requires:
pub struct ObjectHeader {
mark: Mark,
size_class: SizeClass,
type_id: TypeList,
size_bytes: u32,
}
The rest of the header members will be the topic of the later garbage collection part of the book.
A safe pointer abstraction
A type that can represent one of multiple types at runtime is obviously the
enum. We can wrap possible ScopedPtr<T> types like so:
#[derive(Copy, Clone)]
pub enum Value<'guard> {
ArrayU8(ScopedPtr<'guard, ArrayU8>),
ArrayU16(ScopedPtr<'guard, ArrayU16>),
ArrayU32(ScopedPtr<'guard, ArrayU32>),
Dict(ScopedPtr<'guard, Dict>),
Function(ScopedPtr<'guard, Function>),
List(ScopedPtr<'guard, List>),
Nil,
Number(isize),
NumberObject(ScopedPtr<'guard, NumberObject>),
Pair(ScopedPtr<'guard, Pair>),
Partial(ScopedPtr<'guard, Partial>),
Symbol(ScopedPtr<'guard, Symbol>),
Text(ScopedPtr<'guard, Text>),
Upvalue(ScopedPtr<'guard, Upvalue>),
}
Note that this definition does not include all the same types that were
listed above in TypeList. Only the types that can be passed dynamically at
runtime need to be represented here. The types not included here are always
referenced directly by ScopedPtr<T> and are therefore known types at
compile and run time.
You probably also noticed that Value is the fat pointer we discussed
earlier. It is composed of a set of ScopedPtr<T>s, each of which should
only require a single word, and an enum discriminant integer, which will
also, due to alignment, require a word.
This enum, since it wraps ScopedPtr<T> and has the same requirement
for an explicit lifetime, is Safe To Dereference.
As this type occupies the same space as a fat pointer, it isn't the type we want for storing pointers at rest, though. For that type, let's look at the compact tagged pointer type now.
What lies beneath
Below we have a union type, making this an unsafe representation of a pointer.
The tag value will be constrained to the values 0, 1, 2 or 3, which will
determine which of the next four possible members should be accessed. Members
will have to be bit-masked to access their correct values.
#[derive(Copy, Clone)]
pub union TaggedPtr {
tag: usize,
number: isize,
symbol: NonNull<Symbol>,
pair: NonNull<Pair>,
object: NonNull<()>,
}
As you can see, we've allocated a tag for a Symbol type, a Pair type and
one for a numeric type. The fourth member indicates an object whose type
must be determined from the type id in the object header.
Note: Making space for an inline integer is a common use of a tag. It means any integer arithmetic that fits within the available bits will not require memory lookups into the heap to retrieve operands. In our case we've defined the numeric type as an
isize. Since the 2 least significant bits are used for the tag, we will have to right-shift the value by 2 to extract the correct integer value. We'll go into this implementation in more depth in a later chapter.
The tags and masks are defined as:
const TAG_MASK: usize = 0x3;
pub const TAG_SYMBOL: usize = 0x0;
pub const TAG_PAIR: usize = 0x1;
pub const TAG_OBJECT: usize = 0x2;
pub const TAG_NUMBER: usize = 0x3;
const PTR_MASK: usize = !0x3;
Thus you can see from the choice of embedded tag values, we've optimized for
fast identification of Pairs and Symbols and integer math. If we decide to,
it will be easy to switch to other types to represent in the 2 tag bits.
Connecting into the allocation API
Translating between Value and TaggedPtr will be made easier by creating
an intermediate type that represents all types as an enum but doesn't require
a valid lifetime. This type will be useful because it is most closely
ergonomic with the allocator API and the object header type information.
#[derive(Copy, Clone)]
pub enum FatPtr {
ArrayU8(RawPtr<ArrayU8>),
ArrayU16(RawPtr<ArrayU16>),
ArrayU32(RawPtr<ArrayU32>),
Dict(RawPtr<Dict>),
Function(RawPtr<Function>),
List(RawPtr<List>),
Nil,
Number(isize),
NumberObject(RawPtr<NumberObject>),
Pair(RawPtr<Pair>),
Partial(RawPtr<Partial>),
Symbol(RawPtr<Symbol>),
Text(RawPtr<Text>),
Upvalue(RawPtr<Upvalue>),
}
We'll extend Heap (see previous chapter) with a method to return a tagged
pointer on request:
impl Heap {
fn alloc_tagged<T>(&self, object: T) -> Result<TaggedPtr, RuntimeError>
where
FatPtr: From<RawPtr<T>>,
T: AllocObject<TypeList>,
{
Ok(TaggedPtr::from(FatPtr::from(self.heap.alloc(object)?)))
}
}
In this method it's clear that we implemented From<T> to convert
between pointer types. Next we'll look at how these conversions are
implemented.
Type conversions
We have three pointer types: Value, FatPtr and TaggedPtr, each which
has a distinct flavor. We need to be able to convert from one to the other:
TaggedPtr <-> FatPtr -> Value
FatPtr to Value
We can implement From<FatPtr> for TaggedPtr and Value
to convert to the final two possible pointer representations.
Well, not exactly - the function signature
impl From<FatPtr> for Value<'guard> {
fn from(ptr: FatPtr) -> Value<'guard> { ... }
}
is not able to define the 'guard lifetime, so we have to implement a
similar method that can:
impl FatPtr {
pub fn as_value<'guard>(&self, guard: &'guard dyn MutatorScope) -> Value<'guard> {
match self {
FatPtr::ArrayU8(raw_ptr) => {
Value::ArrayU8(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::ArrayU16(raw_ptr) => {
Value::ArrayU16(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::ArrayU32(raw_ptr) => {
Value::ArrayU32(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::Dict(raw_ptr) => Value::Dict(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard))),
FatPtr::Function(raw_ptr) => {
Value::Function(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::List(raw_ptr) => Value::List(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard))),
FatPtr::Nil => Value::Nil,
FatPtr::Number(num) => Value::Number(*num),
FatPtr::NumberObject(raw_ptr) => {
Value::NumberObject(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::Pair(raw_ptr) => Value::Pair(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard))),
FatPtr::Partial(raw_ptr) => {
Value::Partial(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::Symbol(raw_ptr) => {
Value::Symbol(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
FatPtr::Text(raw_ptr) => Value::Text(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard))),
FatPtr::Upvalue(raw_ptr) => {
Value::Upvalue(ScopedPtr::new(guard, raw_ptr.scoped_ref(guard)))
}
}
}
}
FatPtr to TaggedPtr
For converting down to a single-word TaggedPtr type we will introduce a helper
trait and methods to work with tag values and RawPtr<T> types from the
allocator:
pub trait Tagged<T> {
fn tag(self, tag: usize) -> NonNull<T>;
fn untag(from: NonNull<T>) -> RawPtr<T>;
}
impl<T> Tagged<T> for RawPtr<T> {
fn tag(self, tag: usize) -> NonNull<T> {
unsafe { NonNull::new_unchecked((self.as_word() | tag) as *mut T) }
}
fn untag(from: NonNull<T>) -> RawPtr<T> {
RawPtr::new((from.as_ptr() as usize & PTR_MASK) as *const T)
}
}
This will help convert from RawPtr<T> values in FatPtr to the NonNull<T>
based TaggedPtr discriminants.
Because TaggedPtr is a union type and because it has to apply the
appropriate tag value inside the pointer itself, we can't work with it as
ergnomically as an enum. We'll create some more helper functions for
instantiating TaggedPtrs appropriately.
Remember that for storing an integer in the pointer we have to left-shift it 2 bits to allow for the tag. We'll apply proper range checking in a later chapter.
impl TaggedPtr {
pub fn nil() -> TaggedPtr {
TaggedPtr { tag: 0 }
}
pub fn number(value: isize) -> TaggedPtr {
TaggedPtr {
number: (((value as usize) << 2) | TAG_NUMBER) as isize,
}
}
pub fn symbol(ptr: RawPtr<Symbol>) -> TaggedPtr {
TaggedPtr {
symbol: ptr.tag(TAG_SYMBOL),
}
}
fn pair(ptr: RawPtr<Pair>) -> TaggedPtr {
TaggedPtr {
pair: ptr.tag(TAG_PAIR),
}
}
}
Finally, we can use the above methods to implement From<FatPtr for TaggedPtr:
impl From<FatPtr> for TaggedPtr {
fn from(ptr: FatPtr) -> TaggedPtr {
match ptr {
FatPtr::ArrayU8(raw) => TaggedPtr::object(raw),
FatPtr::ArrayU16(raw) => TaggedPtr::object(raw),
FatPtr::ArrayU32(raw) => TaggedPtr::object(raw),
FatPtr::Dict(raw) => TaggedPtr::object(raw),
FatPtr::Function(raw) => TaggedPtr::object(raw),
FatPtr::List(raw) => TaggedPtr::object(raw),
FatPtr::Nil => TaggedPtr::nil(),
FatPtr::Number(value) => TaggedPtr::number(value),
FatPtr::NumberObject(raw) => TaggedPtr::object(raw),
FatPtr::Pair(raw) => TaggedPtr::pair(raw),
FatPtr::Partial(raw) => TaggedPtr::object(raw),
FatPtr::Text(raw) => TaggedPtr::object(raw),
FatPtr::Symbol(raw) => TaggedPtr::symbol(raw),
FatPtr::Upvalue(raw) => TaggedPtr::object(raw),
}
}
}
TaggedPtr to FatPtr
To convert from a TaggedPtr to the intermediate type is implemented in two
parts: identifying object types from the tag; identifying object types from the
header where the tag is insufficient.
Part the first, which requires unsafe due to accessing a union type and
dereferencing the object header for the TAG_OBJECT discriminant:
impl From<TaggedPtr> for FatPtr {
fn from(ptr: TaggedPtr) -> FatPtr {
ptr.into_fat_ptr()
}
}
impl TaggedPtr {
fn into_fat_ptr(&self) -> FatPtr {
unsafe {
if self.tag == 0 {
FatPtr::Nil
} else {
match get_tag(self.tag) {
TAG_NUMBER => FatPtr::Number(self.number >> 2),
TAG_SYMBOL => FatPtr::Symbol(RawPtr::untag(self.symbol)),
TAG_PAIR => FatPtr::Pair(RawPtr::untag(self.pair)),
TAG_OBJECT => {
let untyped_object_ptr = RawPtr::untag(self.object).as_untyped();
let header_ptr = HeapStorage::get_header(untyped_object_ptr);
header_ptr.as_ref().get_object_fatptr()
}
_ => panic!("Invalid TaggedPtr type tag!"),
}
}
}
}
}
And part two, the object header method get_object_fatptr() as seen in the
code above:
impl ObjectHeader {
pub unsafe fn get_object_fatptr(&self) -> FatPtr {
let ptr_to_self = self.non_null_ptr();
let object_addr = HeapStorage::get_object(ptr_to_self);
match self.type_id {
TypeList::ArrayU8 => FatPtr::ArrayU8(RawPtr::untag(object_addr.cast::<ArrayU8>())),
TypeList::ArrayU16 => FatPtr::ArrayU16(RawPtr::untag(object_addr.cast::<ArrayU16>())),
TypeList::ArrayU32 => FatPtr::ArrayU32(RawPtr::untag(object_addr.cast::<ArrayU32>())),
TypeList::Dict => FatPtr::Dict(RawPtr::untag(object_addr.cast::<Dict>())),
TypeList::Function => FatPtr::Function(RawPtr::untag(object_addr.cast::<Function>())),
TypeList::List => FatPtr::List(RawPtr::untag(object_addr.cast::<List>())),
TypeList::NumberObject => {
FatPtr::NumberObject(RawPtr::untag(object_addr.cast::<NumberObject>()))
}
TypeList::Pair => FatPtr::Pair(RawPtr::untag(object_addr.cast::<Pair>())),
TypeList::Partial => FatPtr::Partial(RawPtr::untag(object_addr.cast::<Partial>())),
TypeList::Symbol => FatPtr::Symbol(RawPtr::untag(object_addr.cast::<Symbol>())),
TypeList::Text => FatPtr::Text(RawPtr::untag(object_addr.cast::<Text>())),
TypeList::Upvalue => FatPtr::Upvalue(RawPtr::untag(object_addr.cast::<Upvalue>())),
// Other types not represented by FatPtr are an error to id here
_ => panic!("Invalid ObjectHeader type tag {:?}!", self.type_id),
}
}
}
This method contains no unsafe code and yet we've declared it unsafe!
Manipulating pointer types is not unsafe in of itself, only dereferencing them is unsafe and we are not dereferencing them here.
While we have the safety rails of the enum types to prevent
invalid types from being returned, we could easily mismatch a TypeList value
with an incorrect FatPtr value and return an incorrect type. Additionally
we could forget to untag a pointer, leaving it as an invalid pointer value.
These possible mistakes could cause undefined behavior and quite likely crash the interpreter.
The compiler will not catch these cases and so this is an area for critical scrutiny of correctness! Hence the method is marked unsafe to draw attention.
Using tagged pointers in data structures
Finally, we need to see how to use these types in data structures that we'll create.
In the previous chapter, we defined a CellPtr type that wrapped a RawPtr<T>
in a Cell<T> so that data structures can contain mutable pointers to other
objects. Similarly, we'll want something to wrap tagged pointers:
#[derive(Clone)]
pub struct TaggedCellPtr {
inner: Cell<TaggedPtr>,
}
We'll also wrap Value in a type TaggedScopedPtr that we'll use similarly
to ScopedPtr<T>.
#[derive(Copy, Clone)]
pub struct TaggedScopedPtr<'guard> {
ptr: TaggedPtr,
value: Value<'guard>,
}
This TaggedScopedPtr carries an instance of TaggedPtr and a Value.
This tradeoff means that while this type has three words to heft around,
the TaggedPtr member can be quickly accessed for copying into a
TaggedCellPtr without needing to down-convert from Value.
The type is only suitable for handling pointers that actively need to be dereferenced due to it's size.
Note: Redundancy: TaggedScopedPtr and Value are almost identical in requirement and functionality. TODO: consider merging into one type. See issue https://github.com/rust-hosted-langs/book/issues/30
A TaggedScopedPtr can be obtained by:
- calling
TaggedCellPtr::get() - or the
MutatorView::alloc_tagged()method
The get() method on TaggedCellPtr returns a TaggedScopedPtr:
impl TaggedCellPtr {
pub fn get<'guard>(&self, guard: &'guard dyn MutatorScope) -> TaggedScopedPtr<'guard> {
TaggedScopedPtr::new(guard, self.inner.get())
}
}
The MutatorView method to allocate a new object and get back a tagged
pointer (a TaggedScopedPtr) looks simply like this:
impl MutatorView {
pub fn alloc_tagged<T>(&self, object: T) -> Result<TaggedScopedPtr<'_>, RuntimeError>
where
FatPtr: From<RawPtr<T>>,
T: AllocObject<TypeList>,
{
Ok(TaggedScopedPtr::new(self, self.heap.alloc_tagged(object)?))
}
}
Quick recap
In summary, what we created here was a set of pointer types:
- types suitable for storing a pointer at rest -
TaggedPtrandTaggedCellPtr - types suitable for dereferencing a pointer -
ValueandTaggedScopedPtr - a type suitable for intermediating between the two -
FatPtr- that the heap allocation interface can return
We now have the basic pieces to start defining data structures for our interpreter, so that is what we shall do next!
There are other pointer tagging schemes, notably the use of "spare" NaN bit patterns in 64 bit floating point values. Further, which types are best represented by the tag bits is highly language dependent. Some languages use them for garbage collection information while others may use them for still other types hidden from the language user. In the interest of clarity, we'll stick to a simple scheme.
Symbols and Pairs
To bootstrap our compiler, we'll parse s-expressions into Symbol ad Pair
types, where a Pair is essentially a Lisp cons cell.
The definition of Symbol is just the raw components of a &str:
#[derive(Copy, Clone)]
pub struct Symbol {
name_ptr: *const u8,
name_len: usize,
}
Why this is how Symbol is defined and how we handle these raw components will
be covered in just a bit. First though, we'll delve into the Pair type.
Pairs of pointers
The definition of Pair is
#[derive(Clone)]
pub struct Pair {
pub first: TaggedCellPtr,
pub second: TaggedCellPtr,
// Possible source code positions of the first and second values
pub first_pos: Cell<Option<SourcePos>>,
pub second_pos: Cell<Option<SourcePos>>,
}
The type of first and second is TaggedCellPtr, as seen in the previous
chapter. This pointer type can point at any dynamic type. By the
end of this chapter we'll be able to build a nested linked list of Pairs
and Symbols.
Since this structure will be used for parsing and compiling, the Pair
struct has a couple of extra members that optionally describe the source
code line and character number of the values pointed at by first and
second. These will be useful for reporting error messages. We'll come back
to these in the chapter on parsing.
To instantiate a Pair function with first and second set to nil, let's
create a new() function:
impl Pair {
pub fn new() -> Pair {
Pair {
first: TaggedCellPtr::new_nil(),
second: TaggedCellPtr::new_nil(),
first_pos: Cell::new(None),
second_pos: Cell::new(None),
}
}
}
That function, as it's not being allocated into the heap, doesn't require the
lifetime guard. Let's look at a more interesting function: cons(), which
assigns a value to first and second and puts the Pair on to the heap:
pub fn cons<'guard>(
mem: &'guard MutatorView,
head: TaggedScopedPtr<'guard>,
rest: TaggedScopedPtr<'guard>,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError> {
let pair = Pair::new();
pair.first.set(head);
pair.second.set(rest);
mem.alloc_tagged(pair)
}
Here we have the lifetime 'guard associated with the MutatorView instance
which grants access to the allocator alloc_tagged() method and the getter
and setter on TaggedScopedPtr.
The other two args, head and rest are required to share the same 'guard
lifetime as the MutatorView instance, or rather, 'guard must at least be
a subtype of their lifetimes. Their values, of type TaggedScopedPtr<'guard>,
can be written directly to the first and second members of Pair with
the setter TaggedCellPtr::set().
We'll also add a couple impl methods for appending an object to a Pair
in linked-list fashion:
impl Pair {
pub fn append<'guard>(
&self,
mem: &'guard MutatorView,
value: TaggedScopedPtr<'guard>,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError> {
let pair = Pair::new();
pair.first.set(value);
let pair = mem.alloc_tagged(pair)?;
self.second.set(pair);
Ok(pair)
}
}
This method, given a value to append, creates a new Pair whose member first
points at the value, then sets the second of the &self Pair to that new
Pair instance. This is in support of s-expression notation (a b) which
describes a linked-list of Pairs arranged, in pseudo-Rust:
Pair {
first: a,
second: Pair {
first: b,
second: nil,
},
}
The second method is for directly setting the value of the second for
s-expression dot-notation style: (a . b) is represented by first pointing
at a, dotted with b which is pointed at by second. In our pseudo
representation:
Pair {
first: a,
second: b,
}
The implementation is simply:
impl Pair {
pub fn dot<'guard>(&self, value: TaggedScopedPtr<'guard>) {
self.second.set(value);
}
}
The only other piece to add, since Pair must be able to be passed into
our allocator API, is the AllocObject impl for Pair:
impl AllocObject<TypeList> for Pair {
const TYPE_ID: TypeList = TypeList::Pair;
}
This impl pattern will repeat for every type in TypeList so it'll be a great
candidate for a macro.
And that's it! We have a cons-cell style Pair type and some elementary
methods for creating and allocating them.
Now, back to Symbol, which seems like it should be even simpler, but as we'll
see has some nuance to it.
Symbols and pointers
Let's recap the definition of Symbol and that it is the raw members of a
&str:
#[derive(Copy, Clone)]
pub struct Symbol {
name_ptr: *const u8,
name_len: usize,
}
By this definition, a symbol has a name string, but does not own the string itself. What means this?
Symbols are in fact pointers to interned strings. Since each symbol points to a unique string, we can identify a symbol by it's pointer value rather than needing to look up the string itself.
However, symbols do need to be discovered by their string name, and symbol pointers must dereference to return their string form. i.e. a we need a bidirectional mapping of string to pointer and pointer to string.
In our implementation, we use a HashMap<String, RawPtr<Symbol>> to map from
name strings to symbol pointers, while the Symbol object itself points back
to the name string.
This is encapsulated in a SymbolMap struct:
pub struct SymbolMap {
map: RefCell<HashMap<String, RawPtr<Symbol>>>,
arena: Arena,
}
where we use RefCell to wrap operations in interior mutability, just like
all other allocator functionality.
The second struct member Arena requires further explanation: since symbols are
unique strings that can be identified and compared by their pointer values,
these pointer values must remain static throughout the program lifetime.
Thus, Symbol objects cannot be managed by a heap that might perform object
relocation. We need a separate heap type for objects that are never
moved or freed unil the program ends, the Arena type.
The Arena type is simple. It, like Heap, wraps StickyImmixHeap but
unlike Heap, it will never run garbage collection.
pub struct Arena {
heap: StickyImmixHeap<ArenaHeader>,
}
The ArenaHeader is a simple object header type to fulfill the allocator
API requirements but whose methods will never be needed.
Allocating a Symbol will use the Arena::alloc() method which calls through
to the StickyImmixHeap instance.
We'll add a method for getting a Symbol from it's name string to the
SymbolMap at the allocator API level:
impl SymbolMap {
pub fn lookup(&self, name: &str) -> RawPtr<Symbol> {
{
if let Some(ptr) = self.map.borrow().get(name) {
return *ptr;
}
}
let name = String::from(name);
let ptr = self.arena.alloc(Symbol::new(&name)).unwrap();
self.map.borrow_mut().insert(name, ptr);
ptr
}
}
Then we'll add wrappers to the Heap and MutatorView impls to scope-restrict
access:
impl Heap {
fn lookup_sym(&self, name: &str) -> TaggedPtr {
TaggedPtr::symbol(self.syms.lookup(name))
}
}
and
impl<'memory> MutatorView<'memory> {
pub fn lookup_sym(&self, name: &str) -> TaggedScopedPtr<'_> {
TaggedScopedPtr::new(self, self.heap.lookup_sym(name))
}
}
This scope restriction is absolutely necessary, despite these objects never
being freed or moved during runtime. This is because Symbol, as a standalone
struct, remains unsafe to use with it's raw &str components. These components
can only safely be accessed when there is a guarantee that the backing
Hashmap is still in existence, which is only when the MutatorView is
accessible.
Two methods on Symbol guard access to the &str, one unsafe to reassemble
the &str from raw components, the other safe when given a MutatorScope
guard instance.
impl Symbol {
pub unsafe fn unguarded_as_str<'desired_lifetime>(&self) -> &'desired_lifetime str {
let slice = slice::from_raw_parts(self.name_ptr, self.name_len);
str::from_utf8(slice).unwrap()
}
pub fn as_str<'guard>(&self, _guard: &'guard dyn MutatorScope) -> &'guard str {
unsafe { self.unguarded_as_str() }
}
}
Finally, to make Symbols allocatable in the Sticky Immix heap, we need to
implement AllocObject for it:
impl AllocObject<TypeList> for Symbol {
const TYPE_ID: TypeList = TypeList::Symbol;
}
Moving on swiftly
Now we've got the elemental pieces of s-expressions, lists and symbols, we can move on to parsing s-expression strings.
Since the focus of this book is the underlying mechanisms of memory management in Rust and the details of runtime implementation, parsing will receive less attention. We'll make it quick!
Parsing s-expressions
We'll make this quick. It's not the main focus of this book and the topic is better served by seeking out other resources that can do it justice.
In service of keeping it short, we're parsing s-expressions and we'll start by considering only symbols and parentheses. We could hardly make it simpler.
The interface
The interface we want should take a &str and return a TaggedScopedPtr.
We want the tagged version of the scoped ptr because the return value might
point to either a Pair or a Symbol. Examples of valid input are:
a-symbol: aSymbolwith name "a-symbol"(this is a list): a linked list ofPairs, each with thefirstvalue pointing to aSymbol(this (is a nested) list): a linked list, as above, containing a nested linked list(this () is a nil symbol): the two characters()together are equivalent to the special symbolnil, also the value0in ourTaggedPtrtype(one . pair): a singlePairinstance withfirstpointing at theSymbolfor "one" andsecondat theSymbolfor "two"
Our internal implementation is split into tokenizing and then parsing the
token stream. Tokenizing takes the &str input and returns a Vec<Token>
on success:
fn tokenize(input: &str) -> Result<Vec<Token>, RuntimeError>;
The return Vec<Token> is an intermediate, throwaway value, and does not
interact with our Sticky Immix heap. Parsing takes the Vec<Token> and
returns a TaggedScopedPtr on success:
fn parse_tokens<'guard>(
mem: &'guard MutatorView,
tokens: Vec<Token>,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError>;
Tokens, a short description
The full set of tokens we will consider parsing is:
#[derive(Debug, PartialEq)]
pub enum TokenType {
OpenParen,
CloseParen,
Symbol(String),
Dot,
Text(String),
Quote,
}
We combine this enum with a source input position indicator to compose the
Token type. This source position is defined as:
#[derive(Copy, Clone, Debug, PartialEq)]
pub struct SourcePos {
pub line: u32,
pub column: u32,
}
And whenever it is available to return as part of an error, error messages can be printed with the relevant source code line.
The Token type;
#[derive(Debug, PartialEq)]
pub struct Token {
pub pos: SourcePos,
pub token: TokenType,
}
Parsing, a short description
The key to quickly writing a parser in Rust is the std::iter::Peekable
iterator which can be obtained from the Vec<Token> instance with
tokens.iter().peekable(). This iterator has a peek() method that allows
you to look at the next Token instance without advancing the iterator.
Our parser, a hand-written recursive descent parser, uses this iterator type to look ahead to the next token to identify primarily whether the next token is valid in combination with the current token, or to know how to recurse next without consuming the token yet.
For example, an open paren ( followed by a symbol would start a new Pair
linked list, recursing into a new parser function call, but if it is
immediately followed by a close paren ), that is (), it is equivalent to
the symbol nil, while otherwise ) terminates a Pair linked list and
causes the current parsing function instance to return.
Another case is the . operator, which is only valid in the following pattern:
(a b c . d) where a, b, c, and d must be symbols or nested lists.
A . must be followed by a single expression followed by a ).
Tokenizing and parsing are wrapped in a function that takes the input &str
and gives back the TaggedScopedPtr:
pub fn parse<'guard>(
mem: &'guard MutatorView,
input: &str,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError> {
parse_tokens(mem, tokenize(input)?)
}
Notice that this function and parse_tokens() require the
mem: &'guard MutatorView parameter. Parsing creates Symbol and Pair
instances in our Sticky Immix heap and so requires the scope-restricted
MutatorView instance.
This is all we'll say on parsing s-expressions. In the next chapter we'll do something altogether more informative with regards to memory management and it'll be necessary by the time we're ready to compile: arrays!
Arrays
Before we get to the basics of compilation, we need another data structure: the humble array. The first use for arrays will be to store the bytecode sequences that the compiler generates.
Rust already provides Vec but as we're implementing everything in terms of our
memory management abstraction, we cannot directly use Vec. Rust does not
(yet) expose the ability to specify a custom allocator type as part of Vec,
nor are we interested in replacing the global allocator.
Our only option is to write our own version of Vec! Fortunately we can
learn a lot from Vec itself and it's underlying implementation. Jump over to
the Rustonomicon for a primer on the internals of Vec.
The first thing we'll learn is to split the implementation into a RawArray<T>
type and an Array<T> type. RawArray<T> will provide an unsafe abstraction
while Array<T> will make a safe layer over it.
RawArray
If you've just come back from Implementing Vec in the Nomicon, you'll
recognize what we're doing below with RawArray<T>:
pub struct RawArray<T: Sized> {
/// Count of T-sized objects that can fit in the array
capacity: ArraySize,
ptr: Option<NonNull<T>>,
}
Instead of Unique<T> for the pointer, we're using Option<NonNull<T>>.
One simple reason is that Unique<T> is likely to be permanently unstable and
only available internally to std collections. The other is that we can
avoid allocating the backing store if no capacity is requested yet, setting
the value of ptr to None.
For when we do know the desired capacity, there is
RawArray<T>::with_capacity(). This method, because it allocates, requires
access to the MutatorView instance. If you'll recall from the chapter on
the allocation API, the API provides an array allocation method with
signature:
AllocRaw::alloc_array(&self, size_bytes: ArraySize) -> Result<RawPtr<u8>, AllocError>;
This method is wrapped on the interpreter side by Heap and MutatorView and
in both cases the return value remains, simply, RawPtr<u8> in the success
case. It's up to RawArray<T> to receive the RawPtr<u8> value and maintain
it safely. Here's with_capcity(), now:
pub fn with_capacity<'scope>(
mem: &'scope MutatorView,
capacity: u32,
) -> Result<RawArray<T>, RuntimeError> {
// convert to bytes, checking for possible overflow of ArraySize limit
let capacity_bytes = capacity
.checked_mul(size_of::<T>() as ArraySize)
.ok_or(RuntimeError::new(ErrorKind::BadAllocationRequest))?;
Ok(RawArray {
capacity,
ptr: NonNull::new(mem.alloc_array(capacity_bytes)?.as_ptr() as *mut T),
})
}
Resizing
If a RawArray<T>'s content will exceed it's capacity, there is
RawArray<T>::resize(). It allocates a new backing array using the
MutatorView method alloc_array() and copies the content of the old
over to the new, finally swapping in the new backing array for the old.
The code for this is straightforward but a little longer, go check it out
in interpreter/src/rawarray.rs.
Accessing
Since RawArray<T> will be wrapped by Array<T>, we need a couple more
methods to access the raw memory:
impl<T: Sized> RawArray<T> {
pub fn capacity(&self) -> ArraySize {
self.capacity
}
pub fn as_ptr(&self) -> Option<*const T> {
match self.ptr {
Some(ptr) => Some(ptr.as_ptr()),
None => None,
}
}
}
And that's it! Now for the safe wrapper.
Array
The definition of the struct wrapping RawArray<T> is as follows:
#[derive(Clone)]
pub struct Array<T: Sized + Clone> {
length: Cell<ArraySize>,
data: Cell<RawArray<T>>,
borrow: Cell<BorrowFlag>,
}
Here we have three members:
length- the length of the arraydata- theRawArray<T>being wrappedborrow- a flag serving as a runtime borrow check, allowingRefCellruntime semantics, since we're in a world of interior mutability patterns
We have a method to create a new array - Array::alloc()
impl<T: Sized + Clone> Array<T> {
pub fn alloc<'guard>(
mem: &'guard MutatorView,
) -> Result<ScopedPtr<'guard, Array<T>>, RuntimeError>
where
Array<T>: AllocObject<TypeList>,
{
mem.alloc(Array::new())
}
}
In fact we'll extend this pattern of a method named "alloc" to any data structure for convenience sake.
There are many more methods for Array<T> and it would be exhausting to be
exhaustive. Let's go over the core methods used to read and write elements
and then an example use case.
Reading and writing
First of all, we need a function that takes an array index and returns a pointer to a memory location, if the index is within bounds:
impl<T: Sized + Clone> Array<T> {
fn get_offset(&self, index: ArraySize) -> Result<*mut T, RuntimeError> {
if index >= self.length.get() {
Err(RuntimeError::new(ErrorKind::BoundsError))
} else {
let ptr = self
.data
.get()
.as_ptr()
.ok_or_else(|| RuntimeError::new(ErrorKind::BoundsError))?;
let dest_ptr = unsafe { ptr.offset(index as isize) as *mut T };
Ok(dest_ptr)
}
}
}
There are two bounds checks here - firstly, the index should be within the
(likely non-zero) length values; secondly, the RawArray<T> instance
should have a backing array allocated. If either of these checks fail, the
result is an error. If these checks pass, we can be confident that there
is array backing memory and that we can return a valid pointer to somewhere
inside that memory block.
For reading a value in an array, we need two methods:
- one that handles move/copy semantics and returns a value
- one that handles reference semantics and returns a reference to the original value in it's location in the backing memory
First, then:
impl<T: Sized + Clone> Array<T> {
fn read<'guard>(
&self,
_guard: &'guard dyn MutatorScope,
index: ArraySize,
) -> Result<T, RuntimeError> {
unsafe {
let dest = self.get_offset(index)?;
Ok(read(dest))
}
}
}
and secondly:
impl<T: Sized + Clone> Array<T> {
pub fn read_ref<'guard>(
&self,
_guard: &'guard dyn MutatorScope,
index: ArraySize,
) -> Result<&T, RuntimeError> {
unsafe {
let dest = self.get_offset(index)?;
Ok(&*dest as &T)
}
}
}
Writing, or copying, an object to an array is implemented as simply as follows:
impl<T: Sized + Clone> Array<T> {
pub fn read_ref<'guard>(
&self,
_guard: &'guard dyn MutatorScope,
index: ArraySize,
) -> Result<&T, RuntimeError> {
unsafe {
let dest = self.get_offset(index)?;
Ok(&*dest as &T)
}
}
}
These simple functions should only be used internally by Array<T> impl
methods. We have numerous methods that wrap the above in more appropriate
semantics for values of T in Array<T>.
The Array interfaces
To define the interfaces to the Array, and other collection types, we define a
number of traits. For example, a collection that behaves as a stack implements
StackContainer; a numerically indexable type implements IndexedContainer,
and so on. As we'll see, there is some nuance, though, when it comes to a
difference between collections of non-pointer types and collections of pointer
types.
For our example, we will describe the stack interfaces of Array<T>.
First, the general case trait, with methods for accessing values stored in the array (non-pointer types):
pub trait StackContainer<T: Sized + Clone>: Container<T> {
/// Push can trigger an underlying array resize, hence it requires the ability to allocate
fn push<'guard>(&self, mem: &'guard MutatorView, item: T) -> Result<(), RuntimeError>;
/// Pop returns a bounds error if the container is empty, otherwise moves the last item of the
/// array out to the caller.
fn pop<'guard>(&self, _guard: &'guard dyn MutatorScope) -> Result<T, RuntimeError>;
/// Return the value at the top of the stack without removing it
fn top<'guard>(&self, _guard: &'guard dyn MutatorScope) -> Result<T, RuntimeError>;
}
These are unremarkable functions, by now we're familiar with the references to
MutatorScope and MutatorView in method parameter lists.
In any instance of Array<T>, T need only implement Clone and cannot be
dynamically sized. Thus T can be any primitive type or any straightforward
struct.
What if we want to store pointers to other objects? For example, if we want a
heterogenous array, such as Python's List type, what would we provide in
place of T? The answer is to use the TaggedCellPtr type. However,
an Array<TaggedCellPtr, because we want to interface with pointers and
use the memory access abstractions provided, can be made a little more
ergonomic. For that reason, we have separate traits for containers of type
Container<TaggedCellPtr. In the case of the stack interface this looks like:
pub trait StackAnyContainer: StackContainer<TaggedCellPtr> {
/// Push can trigger an underlying array resize, hence it requires the ability to allocate
fn push<'guard>(
&self,
mem: &'guard MutatorView,
item: TaggedScopedPtr<'guard>,
) -> Result<(), RuntimeError>;
/// Pop returns a bounds error if the container is empty, otherwise moves the last item of the
/// array out to the caller.
fn pop<'guard>(
&self,
_guard: &'guard dyn MutatorScope,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError>;
/// Return the value at the top of the stack without removing it
fn top<'guard>(
&self,
_guard: &'guard dyn MutatorScope,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError>;
}
As you can see, these methods, while for T = TaggedCellPtr, provide an
interface based on passing and returning TaggedScopedPtr.
Let's look at the implementation of one of these methods - push() - for
both StackContainer and StackAnyContainer.
Here's the code for StackContainer::push():
impl<T: Sized + Clone> StackContainer<T> for Array<T> {
fn push<'guard>(&self, mem: &'guard MutatorView, item: T) -> Result<(), RuntimeError> {
if self.borrow.get() != INTERIOR_ONLY {
return Err(RuntimeError::new(ErrorKind::MutableBorrowError));
}
let length = self.length.get();
let mut array = self.data.get(); // Takes a copy
let capacity = array.capacity();
if length == capacity {
if capacity == 0 {
array.resize(mem, DEFAULT_ARRAY_SIZE)?;
} else {
array.resize(mem, default_array_growth(capacity)?)?;
}
// Replace the struct's copy with the resized RawArray object
self.data.set(array);
}
self.length.set(length + 1);
self.write(mem, length, item)?;
Ok(())
}
}
In summary, the order of operations is:
- Check that a runtime borrow isn't in progress. If it is, return an error.
- Since we must implement interior mutability, the member
dataof theArray<T>struct is aCell. We have toget()the content in order to use it. - We then ask whether the array backing store needs to be grown. If so,
we resize the
RawArray<T>and, since it's kept in aCellonArray<T>, we have toset()value back intodatato save the change. - Now we have an
RawArray<T>that has enough capacity, the length is incremented and the object to be pushed is written to the next memory location using the internalArray<T>::write()method detailed earlier.
Fortunately we can implement StackAnyContainer::push() in terms of
StackContainer::push():
impl StackAnyContainer for Array<TaggedCellPtr> {
fn push<'guard>(
&self,
mem: &'guard MutatorView,
item: TaggedScopedPtr<'guard>,
) -> Result<(), RuntimeError> {
StackContainer::<TaggedCellPtr>::push(self, mem, TaggedCellPtr::new_with(item))
}
}
One last thing
To more easily differentiate arrays of type Array<T> from arrays of type
Array<TaggedCellPtr>, we make a type alias List where:
pub type List = Array<TaggedCellPtr>;
In conclusion
We referenced how Vec is implemented internally and followed the same pattern
of defining a RawArray<T> unsafe layer with a safe Array<T> wrapper. Then
we looked into the stack interface for Array<T> and the implementation of
push().
There is more to arrays, of course - indexed access the most obvious, and also
a few convenience methods. See the source code in interpreter/src/array.rs
for the full detail.
In the next chapter we'll put Array<T> to use in a Bytecode type!
Bytecode
In this chapter we will look at a bytecode compilation target. We'll combine this with a section on the virtual machine interface to the bytecode data structure.
We won't go much into detail on each bytecode operation, that will be more usefully covered in the compiler and virtual machine chapters. Here, we'll describe the data structures involved. As such, this will be one of our shorter chapters. Let's go!
Design questions
Now that we're talking bytecode, we're at the point of choosing what type of virtual machine we will be compiling for. The most common type is stack-based where operands are pushed and popped on and off the stack. This requires instructions for pushing and popping, with instructions in-between for operating on values on the stack.
We'll be implementing a register-based VM though. The inspiration for this comes from Lua 51 which implements a fixed-width bytecode register VM. While stack based VMs are typically claimed to be simpler, we'll see that the Lua way of allocating registers per function also has an inherent simplicity and has performance gains over a stack VM, at least for an interpreted non jit-compiled VM.
Given register based, fixed-width bytecode, each opcode must reference the
register numbers that it operates on. Thus, for an (untyped) addition
operation x = a + b, each of x, a and b must be associated with a
register.
Following Lua, encoding this as a fixed width opcode typically looks like encoding the operator and operands as 8 bit values packed into a 32 bit opcode word. That implies, given 8 bits, that there can be a theoretical maximum of 256 registers for a function call. For the addition above, this encoding might look like this:
32.....24......16.......8.......0
[reg a ][reg b ][reg x ][Add ]
where the first 8 bits contain the operator, in this case "Add", and the other three 8 bit slots in the 32 bit word each contain a register number.
For some operators, we will need to encode values larger than 8 bits. As we will still need space for an operator and a destination register, that leaves a maximum of 16 bits for larger values.
Opcodes
We have options in how we describe opcodes in Rust.
- Each opcode represented by a u32
- Pros: encoding flexibility, it's just a set of bits
- Cons: bit shift and masking operations to encode and decode operator and operands. This isn't necessarily a big deal but it doesn't allow us to leverage the Rust type system to avoid encoding mistakes
- Each opcode represented by an enum discriminant
- Pros: operators and operands baked as Rust types at compile time, type safe encoding; no bit operations needed
- Cons: encoding scheme limited to what an enum can represent
The ability to leverage the compiler to prevent opcode encoding errors is attractive and we won't have any need for complex encodings. We'll use an enum to represent all possible opcodes and their operands.
Since a Rust enum can contain named values within each variant, this is what we use to most tightly define our opcodes.
Opcode size
Since we're using enum instead of a directly size-controlled type such as u32
for our opcodes, we have to be more careful about making sure our opcode type
doesn't take up more space than is necessary. 32 bits is ideal for reasons
stated earlier (8 bits for the operator and 8 bits for three operands each.)
Let's do an experiment.
First, we need to define a register as an 8 bit value. We'll also define an inline literal integer as 16 bits.
type Register = u8;
type LiteralInteger = i16;
Then we'll create an opcode enum with a few variants that might be typical:
#[derive(Copy, Clone)]
enum Opcode {
Add {
dest: Register,
a: Register,
b: Register
},
LoadLiteral {
dest: Register,
value: LiteralInteger
}
}
It should be obvious that with an enum like this we can safely pass compiled
bytecode from the compiler to the VM. It should also be clear that this, by
allowing use of match statements, will be very ergonomic to work with.
Theoretically, if we never have more than 256 variants, our variants never have
more than 3 Register values (or one Register and one LiteralInteger sized
value), the compiler should be able to pack Opcode into 32 bits.
Our test: we hope the output of the following code to be 4 - 4 bytes or 32
bits.
use std::mem::size_of;
fn main() {
println!("Size of Opcode is {}", size_of::<Opcode>());
}
And indeed when we run this, we get Size of Opcode is 4!
To keep an eye on this situation, we'll put this check into a unit test:
#[test]
fn test_opcode_is_32_bits() {
// An Opcode should be 32 bits; anything bigger and we've mis-defined some
// variant
assert!(size_of::<Opcode>() == 4);
}
Now, let's put these Opcodes into an array.
An array of Opcode
We can define this array easily, given that Array<T> is a generic type:
pub type ArrayOpcode = Array<Opcode>;
Is this enough to define bytecode? Not quite. We've accommodated 16 bit
literal signed integers, but all kinds of other types can be literals.
We need some way of referencing any literal type in bytecode. For that
we add a Literals type, which is just:
pub type Literals = List;
Any opcode that loads a literal (other than a 16 bit signed integer) will
need to reference an object in the Literals list. This is easy enough:
just as there's a LiteralInteger, we have LiteralId defined as
pub type LiteralId = u16;
This id is an index into the Literals list. This isn't the most efficient
scheme or encoding, but given a preference for fixed 32 bit opcodes, it will
also keep things simple.
The ByteCode type, finally, is a composition of ArrayOpcode and Literals:
#[derive(Clone)]
pub struct ByteCode {
code: ArrayOpcode,
literals: Literals,
}
Bytecode compiler support
There are a few methods implemented for ByteCode:
fn push<'guard>(&self, mem: &'MutatorView, op: Opcode) -> Result<(), RuntimeError>This function pushes a new opcode into theArrayOpcodeinstance.-
This function, given an instruction index into thefn update_jump_offset<'guard>( &self, mem: &'guard MutatorView, instruction: ArraySize, offset: JumpOffset, ) -> Result<(), RuntimeError>ArrayOpcodeinstance, and given that the instruction at that index is a type of jump instruction, sets the relative jump offset of the instruction to the given offset. This is necessary because forward jumps cannot be calculated until all the in-between instructions have been compiled first. -
This function pushes a literal on to thefn push_lit<'guard>( &self, mem: &'guard MutatorView, literal: TaggedScopedPtr ) -> Result<LiteralId, RuntimeError>Literalslist and returns the index - the id - of the item. -
After pushing a literal into thefn push_loadlit<'guard>( &self, mem: &'guard MutatorView, dest: Register, literal_id: LiteralId, ) -> Result<(), RuntimeError>Literalslist, the corresponding load instruction should be pushed into theArrayOpcodelist.
ByteCode and it's functions combined with the Opcode enum are enough to
build a compiler for.
Bytecode execution support
The previous section described a handful of functions for our compiler to use
to build a ByteCode structure.
We'll need a different set of functions for our virtual machine to access
ByteCode from an execution standpoint.
The execution view of bytecode is of a contiguous sequence of instructions and
an instruction pointer. We're going to create a separate ByteCode instance
for each function that gets compiled, so our execution model will have to
be able to jump between ByteCode instances. We'll need a new struct to
represent that:
pub struct InstructionStream {
instructions: CellPtr<ByteCode>,
ip: Cell<ArraySize>,
}
In this definition, the pointer instructions can be updated to point at any
ByteCode instance. This allows us to switch between functions by managing
different ByteCode pointers as part of a stack of call frames. In support
of this we have:
impl InstructionStream {
pub fn switch_frame(&self, code: ScopedPtr<'_, ByteCode>, ip: ArraySize) {
self.instructions.set(code);
self.ip.set(ip);
}
}
Of course, the main function needed during execution is to retrieve the next
opcode. Ideally, we can keep a pointer that points directly at the next opcode
such that only a single dereference and pointer increment is needed to get
the opcode and advance the instruction pointer. Our implementation is less
efficient for now, requiring a dereference of 1. the ByteCode instance and
then 2. the ArrayOpcode instance and finally 3. an indexing into the
ArrayOpcode instance:
pub fn get_next_opcode<'guard>(
&self,
guard: &'guard dyn MutatorScope,
) -> Result<Opcode, RuntimeError> {
let instr = self
.instructions
.get(guard)
.code
.get(guard, self.ip.get())?;
self.ip.set(self.ip.get() + 1);
Ok(instr)
}
Conclusion
The full Opcode definition can be found in interpreter/src/bytecode.rs.
As we work toward implementing a compiler, the next data structure we need is
a dictionary or hash map. This will also build on the foundational
RawArray<T> implementation. Let's go on to that now!
Roberto Ierusalimschy et al, The Implementation of Lua 5.0
Dicts
The implementation of dicts, or hash tables, is going to combine a reuse of the RawArray type and closely follow the Crafting Interpreters design:
- open addressing
- linear probing
- FNV hashing
Go read the corresponding chapter in Crafting Interpreters and then come back here. We won't duplicate much of Bob's excellent explanation of the above terms and we'll assume you are familiar with his chapter when reading ours.
Code design
A Dict in our interpreter will allow any hashable value as a key and any
type as a value. We'll store pointers to the key and the value together in
a struct DictItem.
Here, we'll also introduce the single diversion from Crafting Interpreters' implementation in that we'll cache the hash value and use it as part of a tombstone indicator. This adds an extra word per entry but we will also take the stance that if two keys have the same hash value then the keys are equal. This simplifies our implementation as we won't need to implement object equality comparisons just yet.
#[derive(Clone)]
pub struct DictItem {
key: TaggedCellPtr,
value: TaggedCellPtr,
hash: u64,
}
The Dict itself mirrors Crafting Interpreters' implementation of a count of
used entries and an array of entries. Since tombstones are counted as used
entries, we'll add a separate length that excludes tombstones so we can
accurately report the number of items in a dict.
pub struct Dict {
/// Number of items stored
length: Cell<ArraySize>,
/// Total count of items plus tombstones
used_entries: Cell<ArraySize>,
/// Backing array for key/value entries
data: Cell<RawArray<DictItem>>,
}
Hashing
To implement our compiler we will need to be able to hash the Symbol type and
integers (inline in tagged pointers.)
The Rust standard library defines trait std::hash::Hash that must be
implemented by types that want to be hashed. This trait requires the type to
implement method fn hash<H>(&self, state: &mut H) where H: Hasher.
This signature requires a reference to the type &self to access it's data.
In our world, this is insufficient: we also require a &MutatorScope
lifetime to access an object. We will have to wrap std::hash::Hash in our
own trait that extends, essentially the same signature, with this scope
guard parameter. This trait is named Hashable:
/// Similar to Hash but for use in a mutator lifetime-limited scope
pub trait Hashable {
fn hash<'guard, H: Hasher>(&self, _guard: &'guard dyn MutatorScope, hasher: &mut H);
}
We can implement this trait for Symbol - it's a straightforward wrap of
calling Hash::hash():
impl Hashable for Symbol {
fn hash<'guard, H: Hasher>(&self, guard: &'guard dyn MutatorScope, h: &mut H) {
self.as_str(guard).hash(h)
}
}
Then finally, because this is all for a dynamically typed interpreter, we'll
write a function that can take any type - a TaggedScopedPtr - and attempt
to return a 64 bit hash value from it:
fn hash_key<'guard>(
guard: &'guard dyn MutatorScope,
key: TaggedScopedPtr<'guard>,
) -> Result<u64, RuntimeError> {
match *key {
Value::Symbol(s) => {
let mut hasher = FnvHasher::default();
s.hash(guard, &mut hasher);
Ok(hasher.finish())
}
Value::Number(n) => Ok(n as u64),
_ => Err(RuntimeError::new(ErrorKind::UnhashableError)),
}
}
Now we can take a Symbol or a tagged integer and use them as keys in our
Dict.
Finding an entry
The methods that a dictionary typically provides, lookup, insertion and
deletion, all hinge around one internal function, find_entry().
This function scans the internal RawArray<DictItem> array for a slot that
matches the hash value argument. It may find an exact match for an existing
key-value entry; if it does not, it will return the first available slot for
the hash value, whether an empty never-before used slot or the tombstone
entry of a formerly used slot.
A tombstone, remember, is a slot that previously held a key-value pair but has been deleted. These slots must be specially marked so that when searching for an entry that generated a hash for an earlier slot but had to be inserted at a later slot, we know to keep looking rather than stop searching at the empty slot of a deleted entry.
| Slot | Content |
|---|---|
| n - 1 | empty |
| n | X: hash % capacity == n |
| n + 1 | tombstone |
| n + 2 | Y: hash % capacity == n |
| n + 3 | empty |
For example, in the above table:
- Key
X's hash maps to slotn. - At some point another entry was inserted at slot
n + 1. - Then
Y, with hash mapping also to slotn, was inserted, but had to be bumped to slotn + 2because the previous two slots were occupied. - Then the entry at slot
n + 1was deleted and marked as a tombstone.
If slot n + 1 was simply marked as empty after it's occupant was deleted,
then when searching for Y we wouldn't know to keep searching and find Y in
slot n + 2. Hence, deleted entries are marked differently to empty slots.
Here is the code for the Find Entry function:
/// Given a key, generate the hash and search for an entry that either matches this hash
/// or the next available blank entry.
fn find_entry<'guard>(
_guard: &'guard dyn MutatorScope,
data: &RawArray<DictItem>,
hash: u64,
) -> Result<&'guard mut DictItem, RuntimeError> {
// get raw pointer to base of array
let ptr = data
.as_ptr()
.ok_or(RuntimeError::new(ErrorKind::BoundsError))?;
// calculate the starting index into `data` to begin scanning at
let mut index = (hash % data.capacity() as u64) as ArraySize;
// the first tombstone we find will be saved here
let mut tombstone: Option<&mut DictItem> = None;
loop {
let entry = unsafe { &mut *(ptr.offset(index as isize) as *mut DictItem) as &mut DictItem };
if entry.hash == TOMBSTONE && entry.key.is_nil() {
// this is a tombstone: save the first tombstone reference we find
if tombstone.is_none() {
tombstone = Some(entry);
}
} else if entry.hash == hash {
// this is an exact match slot
return Ok(entry);
} else if entry.key.is_nil() {
// this is a non-tombstone empty slot
if let Some(earlier_entry) = tombstone {
// if we recorded a tombstone, return _that_ slot to be reused
return Ok(earlier_entry);
} else {
return Ok(entry);
}
}
// increment the index, wrapping back to 0 when we get to the end of the array
index = (index + 1) % data.capacity();
}
}
To begin with, it calculates the index in the array from which to start searching. Then it iterates over the internal array, examining each entry's hash and key as it goes.
- The first tombstone that is encountered is saved. This may turn out to be the entry that should be returned if an exact hash match isn't found by the time a never-before used slot is reached. We want to reuse tombstone entries, of course.
- If no tombstone was found and we reach a never-before used slot, return that slot.
- If an exact match is found, return that slot of course.
The external API
Just as we defined some conainer traits for Array<T> to define access to
arrays based on stack or indexed style access, we'll define a container trait
for Dict:
pub trait HashIndexedAnyContainer {
/// Return a pointer to to the object associated with the given key.
/// Absence of an association should return an error.
fn lookup<'guard>(
&self,
guard: &'guard dyn MutatorScope,
key: TaggedScopedPtr,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError>;
/// Associate a key with a value.
fn assoc<'guard>(
&self,
mem: &'guard MutatorView,
key: TaggedScopedPtr<'guard>,
value: TaggedScopedPtr<'guard>,
) -> Result<(), RuntimeError>;
/// Remove an association by its key.
fn dissoc<'guard>(
&self,
guard: &'guard dyn MutatorScope,
key: TaggedScopedPtr,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError>;
/// Returns true if the key exists in the container.
fn exists<'guard>(
&self,
guard: &'guard dyn MutatorScope,
key: TaggedScopedPtr,
) -> Result<bool, RuntimeError>;
}
This trait contains the external API that Dict will expose for managing
keys and values. The implementation of each of these methods will be in terms
of the find_entry() function described above. Let's look at a couple of the
more complex examples, assoc() and dissoc().
assoc
impl HashIndexedAnyContainer for Dict {
fn assoc<'guard>(
&self,
mem: &'guard MutatorView,
key: TaggedScopedPtr<'guard>,
value: TaggedScopedPtr<'guard>,
) -> Result<(), RuntimeError> {
let hash = hash_key(mem, key)?;
let mut data = self.data.get();
// check the load factor (what percentage of the capacity is or has been used)
if needs_to_grow(self.used_entries.get() + 1, data.capacity()) {
// create a new, larger, backing array, and copy all existing entries over
self.grow_capacity(mem)?;
data = self.data.get();
}
// find the slot whose entry matches the hash or is the nearest available entry
let entry = find_entry(mem, &data, hash)?;
// update counters if necessary
if entry.key.is_nil() {
// if `key` is nil, this entry is unused: increment the length
self.length.set(self.length.get() + 1);
if entry.hash == 0 {
// if `hash` is 0, this entry has _never_ been used: increment the count
// of used entries
self.used_entries.set(self.used_entries.get() + 1);
}
}
// finally, write the key, value and hash to the entry
entry.key.set(key);
entry.value.set(value);
entry.hash = hash;
Ok(())
}
}
dissoc
impl HashIndexedAnyContainer for Dict {
fn dissoc<'guard>(
&self,
guard: &'guard dyn MutatorScope,
key: TaggedScopedPtr,
) -> Result<TaggedScopedPtr<'guard>, RuntimeError> {
let hash = hash_key(guard, key)?;
let data = self.data.get();
let entry = find_entry(guard, &data, hash)?;
if entry.key.is_nil() {
// a nil key means the key was not found in the Dict
return Err(RuntimeError::new(ErrorKind::KeyError));
}
// decrement the length but not the `used_entries` count
self.length.set(self.length.get() - 1);
// write the "tombstone" markers to the entry
entry.key.set_to_nil();
entry.hash = TOMBSTONE;
// return the value that was associated with the key
Ok(entry.value.get(guard))
}
}
As you can see, once find_entry() is implemented as a separate function,
these methods become fairly easy to comprehend.
Conclusion
If you haven't read Bob Nystron's chapter on hash tables in Crafting Interpreters we encourage you to do so: it will help make sense of this chapter.
Now, we'll transition to some compiler and virtual machine design before we continue with code implementation.
Virtual Machine: Architecture and Design
In this short chapter we will outline our virtual machine design choices. These are substantially a matter of pragmatic dynamic language implementation points and as such, borrow heavily from uncomplicated prior work such as Lua 5 and Crafting Interpreters.
Bytecode
We already discussed our Lua-inspired bytecode in a previous chapter. To recap, we are using 32 bit fixed-width opcodes with space for 8 bit register identifiers and 16 bit literals.
The stack
Following the example of Crafting Interpreters we'll maintain two separate stack data structures:
- the register stack for storing stack values
- the call frame stack
In our case, these are best separated out because the register stack will be
composed entirely of TaggedCellPtrs.
To store call frames on the register stack we would have to either:
- allocate every stack frame on the heap with pointers to them from the register stack
- or coerce a call frame
structtype into the register stack type
Neither of these is attractive so we will maintain the call frame stack as an independent data structure.
The register stack
The register stack is a homogeneous array of TaggedCellPtrs. Thus, no object
is allocated directly on the stack, all objects are heap allocated and the stack
only consists of pointers to heap objects. The exception is literal integers
that fit within the range allowed by a tagged pointer.
Since this is a register virtual machine, not following stack push and pop semantics, and bytecode operands are limited to 8 bit register indexes, a function is limited to addressing a maximum of 256 contiguous registers.
Due to function call nesting, the register stack may naturally grow much more than a length of 256.
This requires us to implement a sliding window into the register stack which will move as functions are called and return. The call frame stack will contain the stack base pointer for each function call. We can then happily make use a Rust slice to implement the window of 256 contiguous stack slots which a function call is limited to.
The call frame stack
A call frame needs to store three critical data points:
- a pointer to the function being executed
- the return instruction pointer when a nested function is called
- the stack base pointer for the function call
These three items can form a simple struct and we can define an
Array<CallFrame> type for optimum performance.
Global values
To store global values, we have all we need: the Dict type that maps Symbols
to another value. The VM will, of course, have an abstraction over the internal
Dict to enforce Symbols only as keys.
Closures
In the classic upvalues implementation from Lua 5, followed also by Crafting Interpreters, a linked list of upvalues is used to map stack locations to shared variables.
In every respect but one, our implementation will be similar.
In our implementation, we'll use the Dict type that we already have available
to do this mapping of stack locations to shared variables.
As the language and compiler will implement lexical scoping, the compiler will
have static knowledge of the relative stack locations of closed-over variables
and can generate the appropriate bytecode operands for the virtual machine to
calculate the absolute stack locations at runtime. Thus, absolute stack
locations can be mapped to Upvalue objects and so a Dict can be employed to
facilitate the mapping. This obviates the need to implement a linked list data
structure.
The compiler must issue instructions to tell the VM when to make a closure data structure. It can do so, of course, because simple analysis shows whether a function references nonlocal bindings. A closure data structure as generated by the compiler must reference the function that will be called and the list of relative stack locations that correspond to each nonlocal binding.
The VM, when executing the instruction to make a closure, will calculate the
absolute stack locations for each nonlocal binding and create the closure
environment - a List<Upvalue>. VM instructions within the function code, as in
Lua, indirectly reference nonlocal bindings by indexing into this environment.
Partial functions
Here is one point where we will introduce a less common construct in our virtual
machine. Functions will be first class, that is they are objects that can be
passed around as values and arguments. On top of that, we'll allow passing
insufficient arguments to a function when it is called. The return value of
such an operation will, instead of an error, be a Partial instance. This value
must carry with it the arguments given and a pointer to the function waiting to
be called.
This is insufficient for a fully featured currying implementation but is an interesting extension to first class functions, especially as it allows us to not require lambdas to be constructed syntactically every time they might be used.
By that we mean the following: if we have a function (def mul (x y) (* x y)),
to turn that into a function that multiplies a number by 3 we'd normally have to
define a second function, or lambda, (lambda (x) (mul x 3)) and call it
instead. However, with a simple partial function implementation we can avoid the
lambda definition and call (mul 3) directly, which will collect the function
pointer for mul and argument 3 into a Partial and wait for the final
argument before calling into the function mul with both required arguments.
Note: We can use the same struct for both closures and partial functions. A closure is a yet-to-be-called function carrying a list of references to values. or a list of values. A partial is a yet-to-be-called function carrying a list of arguments. They look very similar, and it's possible, of course, to partially apply arguments to a closure.
Instruction dispatch
In dispatch, one optimal outcome is to minimize the machine code overhead between each VM instruction code. This overhead, where the next VM instruction is fetched, decoded and mapped to the entry point of the instruction code, is the dispatch code. The other axis of optimization is code ergonomics.
Prior research into implementing dispatch in Rust concludes that simple switch-style dispatch is the only cross-platform construct we can reasonably make use of. Other mechanisms come with undesirable complexity or are platform dependent. For the most part, with modern CPU branch prediction, the overhead of switch dispatch is small.
What this looks like: a single match expression with a pattern to represent
each bytecode discriminant, all wrapped in a loop. To illustrate:
loop {
let opcode = get_next_opcode();
match opcode {
Opcode::Add(a, x, y) => { ... },
Opcode::Call(f, r, p) => { ... },
}
}
That's it!
Next we'll look at the counterpart of VM design - compiler design.
Virtual Machine: Implementation
In this chapter we'll dive into some of the more interesting and important implementation details of our virtual machine.
To begin with, we'll lay out a struct for a single thread of execution. This struct should contain everything needed to execute the output of the compiler.
pub struct Thread {
/// An array of CallFrames
frames: CellPtr<CallFrameList>,
/// An array of pointers any object type
stack: CellPtr<List>,
/// The current stack base pointer
stack_base: Cell<ArraySize>,
/// A dict that should only contain Number keys and Upvalue values. This is a mapping of
/// absolute stack indeces to Upvalue objects where stack values are closed over.
upvalues: CellPtr<Dict>,
/// A dict that should only contain Symbol keys but any type as values
globals: CellPtr<Dict>,
/// The current instruction location
instr: CellPtr<InstructionStream>,
}
Here we see every data structure needed to represent:
- function call frames
- stack values
- closed-over stack values (Upvalues)
- global values
- bytecode to execute
The VM's primary operation is to iterate through instructions, executing each
in sequence. The outermost control struture is, therefore, a loop containing
a match expression.
Here is a code extract of the opening lines of this match operation. The
function shown is a member of the Thread struct. It evaluates the next
instruction and is called in a loop by an outer function. We'll look at several
extracts from this function in this chapter.
/// Execute the next instruction in the current instruction stream
fn eval_next_instr<'guard>(
&self,
mem: &'guard MutatorView,
) -> Result<EvalStatus<'guard>, RuntimeError> {
// TODO not all these locals are required in every opcode - optimize and get them only
// where needed
let frames = self.frames.get(mem);
let stack = self.stack.get(mem);
let globals = self.globals.get(mem);
let instr = self.instr.get(mem);
// Establish a 256-register window into the stack from the stack base.
let status = stack.access_slice(mem, |full_stack| {
let stack_base = self.stack_base.get() as usize;
let window = &mut full_stack[stack_base..stack_base + 256];
// Fetch the next instruction and identify it
let opcode = instr.get_next_opcode(mem)?;
match opcode {
// Do nothing.
Opcode::NoOp => return Ok(EvalStatus::Pending),
...
The function obtains a slice view of the register stack, then narrows that down to a 256 register window for the current function.
Then it fetches the next opcode and using match, decodes it.
Let's take a closer look at the stack.
The stack
While some runtimes and compilers, particularly low-level languages, have a single stack that represents both function call information and local variables, our high-level runtime splits the stack into:
- a stack of
CallFrameobjects containing function call and return information - and a register stack for local variables.
Let's look at each in turn.
The register stack
In our Thread struct, the register stack is represented by the two members:
pub struct Thread {
...
stack: CellPtr<List>,
stack_base: Cell<ArraySize>,
...
}
Remember that the List type is defined as Array<TaggedCellPtr> and is
therefore an array of tagged pointers. Thus, the register stack is a homogenous
array of word sized values that are pointers to objects on the heap or values
that can be inlined in the tagged pointer word.
We also have a stack_base variable to quickly retrieve the offset into stack
that indicates the beginning of the window of 256 registers that the current
function has for it's local variables.
The call frame stack
In our Thread struct, the call frame stack is represented by the members:
pub struct Thread {
...
frames: CellPtr<CallFrameList>,
instr: CellPtr<InstructionStream>,
...
}
A CallFrame and an array of them are defined as:
#[derive(Clone)]
pub struct CallFrame {
/// Pointer to the Function being executed
function: CellPtr<Function>,
/// Return IP when returning from a nested function call
ip: Cell<ArraySize>,
/// Stack base - index into the register stack where register window for this function begins
base: ArraySize,
}
pub type CallFrameList = Array<CallFrame>;
A CallFrame contains all the information needed to resume a function when
a nested function call returns:
- a
Functionobject, which references theBytecodecomprising the function - the return instruction pointer
- the stack base index for the function's stack register window
On every function call, a CallFrame instance is pushed on to the Thread's
frames stack and on every return from a function, the top CallFrame is
popped off the stack.
Additionally, we keep a pointer to the current executing function (the function
represented by the top CallFrame) with the member instr: CellPtr<InstructionStream>.
For a review of the definition of InstructionStream see the
bytecode chapter where we defined it as
a pair of values - a ByteCode reference and a pointer to the next Opcode
to fetch.
The VM keeps the InstructionStream object pointing at the same ByteCode
object as is pointed at by the Function in the CallFrame at the top of
the call frame stack. Thus, when a call frame is popped off the stack, the
InstructionStream is updated with the ByteCode and instruction pointer
from the CallFrame at the new stack top; and similarly when a function
is called into and a new CallFrame is pushed on to the stack.
Functions and function calls
Function objects
Since we've mentioned Function objects above, let's now have a look at the
definition.
#[derive(Clone)]
pub struct Function {
/// name could be a Symbol, or nil if it is an anonymous fn
name: TaggedCellPtr,
/// Number of arguments required to activate the function
arity: u8,
/// Instructions comprising the function code
code: CellPtr<ByteCode>,
/// Param names are stored for introspection of a function signature
param_names: CellPtr<List>,
/// List of (CallFrame-index: u8 | Window-index: u8) relative offsets from this function's
/// declaration where nonlocal variables will be found. Needed when creating a closure. May be
/// nil
nonlocal_refs: TaggedCellPtr,
}
Instances of Function are produced by the compiler, one for each function
definition that is compiled, including nested function definitions.
A Function object is a simple collection of values, some of which may be
nil. Any member represented by a TaggedCellPtr may, of course, contain
a nil value.
Thus the function may be anonymous, represented by a nil name value.
While the function name is optional, the parameter names are always included. Though they do not need to be known in order to execute the function, they are useful for representing the function in string form if the programmer needs to introspect a function object.
Members that are required to execute the function are the arity, the
ByteCode and any nonlocal references.
Nonlocal references are an optional list of (relative_stack_frame, register)
tuples, provided by the compiler, that are needed to locate nonlocal variables
on the register stack. These are, of course, a key component of implementing
closures.
We'll talk about closures shortly, but before we do, we'll extend Functions
with partial application of arguments.
Partial functions
A partial function application takes a subset of the arguments required to make a function call. These arguments must be stored for later.
Thus, a Partial object references the Function to be called and a list
of arguments to give it when the call is finally executed.
Below is the definition of Partial. Note that it also contains a possible
closure environment which, again, we'll arrive at momentarily.
#[derive(Clone)]
pub struct Partial {
/// Remaining number of arguments required to activate the function
arity: u8,
/// Number of arguments already applied
used: u8,
/// List of argument values already applied
args: CellPtr<List>,
/// Closure environment - must be either nil or a List of Upvalues
env: TaggedCellPtr,
/// Function that will be activated when all arguments are applied
func: CellPtr<Function>,
}
The arity and used members indicate how many arguments are expected and how
many have been given. These are provided directly in this struct rather than
requiring dereferencing the arity on the Function object and the length of
the args list. This is for convenience and performance.
Each time more arguments are added to a Partial, a new Partial instance must
be allocated and the existing arguments copied over. A Partial object, once
created, is immutable.
Closures
Closures and partial applications have, at an abstract level, something in common: they both reference values that the function will need when it is finally called.
It's also possible, of course, to have a partially applied closure.
We can extend the Partial definition with a closure environment so that we can
use the same object type everywhere to represent a function pointer, applied
arguments and closure environment as needed.
Compiling a closure
The compiler, because it keeps track of variable names and scopes, knows when a
Function references nonlocal variables. After such a function is defined, the
compiler emits a MakeClosure instruction.
Referencing the stack with upvalues
The VM, when it executes MakeClosure, creates a new Partial object. It
then iterates over the list of nonlocal references and allocates an Upvalue
object for each, which are added to the env member on the Partial object.
The below code extract is from the function Thread::eval_next_instr() in
the MakeClosure instruction decode and execution block.
The two operands of the MakeClosure operation - dest and function - are
registers. function points at the Function to be given an environment and
made into a closure Partial instance; the pointer to this instance will be
written to the dest register.
// This operation should be generated by the compiler after a function definition
// inside another function but only if the nested function refers to nonlocal
// variables.
// The result of this operation is a Partial with a closure environment
Opcode::MakeClosure { dest, function } => {
// 1. iter over function nonlocals
// - calculate absolute stack offset for each
// - find existing or create new Upvalue for each
// - create closure environment with list of Upvalues
// 2. create new Partial with environment
// 3. set dest to Partial
let function_ptr = window[function as usize].get(mem);
if let Value::Function(f) = *function_ptr {
let nonlocals = f.nonlocals(mem);
// Create an environment array for upvalues
let env = List::alloc_with_capacity(mem, nonlocals.length())?;
// Iter over function nonlocals, calculating absolute stack offset for each
nonlocals.access_slice(mem, |nonlocals| -> Result<(), RuntimeError> {
for compound in nonlocals {
// extract 8 bit register and call frame values from 16 bit nonlocal
// descriptors
let frame_offset = (*compound >> 8) as ArraySize;
let window_offset = (*compound & 0xff) as ArraySize;
// look back frame_offset frames and add the register number to
// calculate the absolute stack position of the value
let frame = frames.get(mem, frames.length() - frame_offset)?;
let location = frame.base + window_offset;
// look up, or create, the Upvalue for the location, and add it to
// the environment
let (_, upvalue) = self.upvalue_lookup_or_alloc(mem, location)?;
StackAnyContainer::push(&*env, mem, upvalue.as_tagged(mem))?;
}
Ok(())
})?;
// Instantiate a Partial function application from the closure environment
// and set the destination register
let partial = Partial::alloc(mem, f, Some(env), &[])?;
window[dest as usize].set(partial.as_tagged(mem));
} else {
return Err(err_eval("Cannot make a closure from a non-Function type"));
}
}
The Upvalue struct itself is defined as:
#[derive(Clone)]
pub struct Upvalue {
// Upvalue location can't be a pointer because it would be a pointer into the dynamically
// alloocated stack List - the pointer would be invalidated if the stack gets reallocated.
value: TaggedCellPtr,
closed: Cell<bool>,
location: ArraySize,
}
An Upvalue is an object that references an absolute register stack location
(that is the location member.)
The initial value of closed is false. In this state, the location on the
stack that contains the variable must be a valid location. That is, the stack
can not have been unwound yet. If the closure is called, Upvalues in this
state are simply an indirection between the function and the variable on the
register stack.
The compiler is able to keep track of variables and whether they are closed
over. It emits bytecode instructions to close Upvalue objects when variables
on the stack go out of scope.
This instruction, CloseUpvalues, copies the variable from the register stack
to the value member of the Upvalue object and sets closed to true.
From then on, when the closure reads or writes to this variable, the value on
the Upvalue object is modified rather than the location on the register stack.
Global values
pub struct Thread {
...
globals: CellPtr<Dict>,
...
}
The outermost scope of a program's values and functions are the global values.
We can manage these with an instance of a Dict. While a Dict can use any
hashable value as a key, internally the VM will only allow Symbols to be
keys. That is, globals must be named objects.
Next...
Let's dive into the compiler!
Compiler: Design
Drawing from the VM design, the compiler must support the following language constructs:
- function definitions
- anonymous functions
- function calls
- lexical scoping
- closures
- local variables
- global variables
- expressions
This is a minimally critical set of features that any further language constructs can be built on while ensuring that our compiler remains easy to understand for the purposes of this book.
Our parser, recall, reads in s-expression syntax
and produces a nested Pair and Symbol based abstract syntax tree. Adding
other types - integers, strings, arrays etc - is mostly a matter of expanding
the parser. The compiler as described here, being for a dynamically typed
language, will support them without refactoring.
Eval/apply
Our compiler design is based on the eval/apply pattern.
In this pattern we recursively descend into the Pair AST, calling eval on
the root node of the expression to be compiled.
Eval is, of course, short for "evaluate" - we want to evaluate the given expression. In the case of a compiler, we don't want the result yet, rather the sequence of instructions that will generate the result.
More concretely, eval looks at the node in the AST it is given and if it resolves to fetching a value for a variable, it generates that instruction; otherwise if it is a compound expression, the arguments are evaluated and then the function and arguments are passed to apply, which generates appropriate function call instructions.
Designing an Eval function
Eval looks at the given node and attempts to generate an instruction for it that would resolve the node to a value - that is, evaluate it.
Symbols
If the node is a special symbol, such as nil or true, then it is treated as
a literal and an instruction is generated to load that literal symbol into the
next available register.
Otherwise if the node is any other symbol, it is assumed to be bound to a value (it must be a variable) and an instruction is generated for fetching the value into a register.
Variables come in three kinds: local, nonlocal or global.
Local: the symbol has been declared earlier in the expression (either it is
a function parameter or it was declared using let) and the compiler already
has a record of it. The symbol is already associated with a local register
index and a simple register copy instruction is generated.
Nonlocal: the symbol has been bound in a parent nesting function. Again, the compiler already has a record of the declaration, which register is associated with the symbol and which relative call frame will contain that register. An upvalue lookup instruction is generated.
Global: if the symbol isn't found as a local binding or a nonlocal binding, it is assumed to be a global, and a late-binding global lookup instruction is generated. In the event the programmer has misspelled a variable name, this is possibly the instruction that will be generated and the programmer will see an unknown-variable error at runtime.
Expressions and function calls
When eval is passed a Pair, this represents the beginning of an expression,
a function call. A composition of things.
In s-expression syntax, all expressions and function calls looks like
(function_name arg1 arg2). That is parsed into a Pair tree, which takes
the form:
Pair(
Symbol(function_name),
Pair(
Symbol(arg1),
Pair(
Symbol(arg2),
nil
)
)
)
It is apply's job to handle this case, so eval extracts the first and
second values from the outermost Pair and passes them into apply. In more
general terms, eval calls apply with the function name and the argument
list and leaves the rest up to apply.
Designing an Apply function
Apply takes a function name and a list of arguments. First it recurses into eval for each argument expression, then generates instructions to call the function with the argument results.
Calling functions
Functions are either built into to the language and VM or are library/user-defined functions composed of other functions.
In every case, the simplified pattern for function calls is:
- allocate a register to write the return value into
- eval each of the arguments in sequence, allocating their resulting values into consequent registers
- compile the function call opcode, giving it the number of argument registers it should expect
Compiling a call to a builtin function might translate directly to a dedicated
bytecode operation. For example, querying whether a value is nil with builtin
function nil? compiles 1:1 to a bytecode operation that directly represents
that query.
Compiling a call to a user defined function is a more involved. In it's more general form, supporting first class functions and closures, a function call requires two additional pointers to be placed in registers. The complete function call register allocation looks like this:
| Register | Use |
|---|---|
| 0 | reserved for return value |
| 1 | reserved for closure environment pointer |
| 2 | first argument |
| 3 | second argument |
| ... | |
| n | function pointer |
If a closure is called, the closure object itself contains a pointer to it's
environment and the function to call and those pointers can be copied over to
registers. Otherwise, the closure environment pointer will be a nil pointer.
The VM, when entering a new function, will represent the return value register always as the zeroth register.
When the function call returns, all registers except the return value are discarded.
Compiling functions
Let's look at a simple function definition:
(def is_true (x)
(is? x true))
This function has a name is_true, takes one argument x and evaluates one
expression (is? x true).
The same function may be written without a name:
(lambda (x) (is? x true))
Compiling a function requires a few inputs:
- an optional reference to a parent nesting function
- an optional function name
- a list of argument names
- a list of expressions that will compute the return value
The desired output is a data structure that combines:
- the optional function name
- the argument names
- the compiled bytecode
First, a scope structure is established. A scope is a lexical block in which variables are bound and unbound. In the compiler, this structure is simply a mapping of variable name to the register number that contains the value.
The first variables to be bound in the function's scope are the argument names. The compiler, given the list of argument names to the function and the order in which the arguments are given, associates each argument name with the register number that will contain it's value. As we saw above, these are predictably and reliably registers 2 and upward, one for each argument.
A scope may have a parent scope if the function is defined within another function. This is how nonlocal variable references will be looked up. We will go further into that when we discuss closures.
The second step is to eval each expression in the function, assigning the result to register 0, the preallocated return value register. The result of compiling each expression via eval is bytecode.
Thirdly and finally, a function object is instantiated, given it's name, the argument names and the bytecode.
Compiling closures
During compilation of the expressions within a function, if any of those expressions reference nonlocal variables (that is, variables not declared within the scope of the function) then the function object needs additional data to describe how to access those nonlocal variables at runtime.
In the below example, the anonymous inner function references the parameter
n to the outer function, n. When the inner function is returned, the value
of n must be carried with it even after the stack scope of the outer function
is popped and later overwritten with values for other functions.
(def make_adder (n)
(lambda (x) (+ x n))
)
Eval, when presented with a symbol to evaluate that has not been declared in
the function scope, searches outer scopes next. If a binding is found in an
outer scope, a nonlocal reference is added to the function's local scope
that points to the outer scope and a GetUpvalue instruction is compiled.
This nonlocal reference is a combination of two values: a count of stack frames to skip over to find the outer scope variable and the register offset in that stack frame.
Non-local references are added to the function object that is returned by the function compiler. The VM will use these to identify the absolute location on the stack where a nonlocal variable should be read from and create upvalue objects at runtime when a variable is closed over.
Compiling let
Let is the declaration of variables and assigning values: the binding of values, or the results of expressions, to symbols. Secondly, it provides space to evaluate expressions that incorporate those variables.
Here we bind the result of (make_adder 3) - a function - to the symbol
add_3 and then call add_3 with argument 4.
(let ((add_3 (make_adder 3)))
(add_3 4))
The result of the entire let expression should be 7.
Compiling let simply introduces additional scopes within a function scope.
That is, instead of a function containing a single scope for all it's
variables, scopes are nested. A stack of scopes is needed, with the parameters
occupying the outermost scope.
First a new scope is pushed on to the scope stack and each symbol being bound is added to the new scope.
To generate code, a result register is reserved and a register for each binding is reserved.
Finally, each expression is evaluated and the scope is popped, removing the bindings from view.
Register allocation
A function call may make use of no more than 256 registers. Recall from earlier that the 0th register is reserved for the function return value and subsequent registers are reserved for the function arguments.
Beyond these initial registers the compiler uses a simple strategy in register
allocation: if a variable (a parameter or a let binding) is declared, it is
allocated a register based on a stack discipline. Thus, variables are
essentially pushed and popped off the register stack as they come into and out
of scope.
This strategy primarily ensures code simplicity - there is no register allocation optimization.
C'est tout!
That covers the VM and compiler design at an overview level. We've glossed over a lot of detail but the next chapters will expose the implementation detail. Get ready!
Compiler: Implementation
Before we get into eval and apply let's consider how we will support variables and lexical scoping.
Variables and Scopes
As seen in the previous chapter, variable accesses come in three types, as far as the compiler and VM are concerned: local, nonlocal and global. Each access uses a different bytecode operation, and so the compiler must be able to determine what operations to emit at compile time.
Given that we have named function parameters and let, we have syntax for
explicit variable declaration within function definitions. This means that we
can easily keep track of whether a variable reference is local, nonlocal or
global.
If a variable wasn't declared as a parameter or in a let block, it
must be global and global variables are accessed dynamically by name.
As far as local and nonlocal variables are concerned, the VM does not care about or consider their names. At the VM level, local and nonlocal variables are numbered registers. That is, each function's local variables are mapped to a register numbered between 2 and 255. The compiler must generate the mapping from variable names to register numbers.
For generating and maintaining mappings, we need data structures for keeping track of:
- function local variables and their mappings to register numbers
- references to nonlocal variables and their relative stack offsets
- nested scopes within functions
Named variables
Our first data structure will define a register based variable:
/// A variable is a named register. It has compile time metadata about how it is used by closures.
struct Variable {
register: Register,
closed_over: Cell<bool>,
}
For every named, non-global variable (created by defining function parameters
and let blocks) a Variable instance is created in the compiler.
The member closed_over defaults to false. If the compiler detects that the
variable must escape the stack as part of a closure, this flag will be flipped
to true (it cannot be set back to false.)
Scope structure
The data structures that manage nesting of scopes and looking up a Variable
by name are defined here.
/// A Scope contains a set of local variable to register bindings
struct Scope {
/// symbol -> variable mapping
bindings: HashMap<String, Variable>,
}
/// A nonlocal reference will turn in to an Upvalue at VM runtime.
/// This struct stores the non-zero frame offset and register values of a parent function call
/// frame where a binding will be located.
struct Nonlocal {
upvalue_id: u8,
frame_offset: u8,
frame_register: u8,
}
/// A Variables instance represents a set of nested variable binding scopes for a single function
/// definition.
struct Variables<'parent> {
/// The parent function's variables.
parent: Option<&'parent Variables<'parent>>,
/// Nested scopes, starting with parameters/arguments on the outermost scope and let scopes on
/// the inside.
scopes: Vec<Scope>,
/// Mapping of referenced nonlocal nonglobal variables and their upvalue indexes and where to
/// find them on the stack.
nonlocals: RefCell<HashMap<String, Nonlocal>>,
/// The next upvalue index to assign when a new nonlocal is encountered.
next_upvalue: Cell<u8>,
}
For every function defined, the compiler maintains an instance of the type
Variables.
Each function's Variables has a stack of Scope instances, each of which has
it's own set of name to Variable register number mappings. The outermost
Scope contains the mapping of function parameters to registers.
A nested function's Variables, when the function refers to a nesting
function's variable, builds a mapping of nonlocal variable name to relative
stack position of that variable. This is a NonLocal - a relative stack frame
offset and the register number within that stack frame of the variable.
In summary, under these definitions:
- A
Nonlocalinstance caches a relative stack location of a nonlocal variable for compiling upvalues Scopemanages the mapping of a variable name to theVariableregister number within a single scopeVariablesmaintains all the nested scopes for a function during compilation and caches all the nonlocal references. It also keeps a reference to a parent nesting function if there is one, in order to handle lexically scoped lookups.
Retrieving named variables
Whenever a variable is referenced in source code, the mapping to it's register
must be looked up. The result of a lookup is Option<Binding>.
/// A binding can be either local or via an upvalue depending on how a closure refers to it.
#[derive(Copy, Clone, PartialEq)]
enum Binding {
/// An local variable is local to a function scope
Local(Register),
/// An Upvalue is an indirection for pointing at a nonlocal variable on the stack
Upvalue(UpvalueId),
}
The lookup process checks the local function scopes first.
If the variable is found to be declared there, Some(Local) enum variant is
returned. In terms of bytecode, this will translate to a direct register
reference.
Next, any outer function scopes are searched. If the variable is found in any
outer scope, Some(Upvalue) variant is returned. The compiler will emit
instructions to copy the value refered to by the upvalue into a function-local
temporary register.
If the lookup for the variable returns None, a global lookup instruction is
emitted that will dynamically look up the variable name in the global namespace
and copy the result into a function-local temporary register or raise an error
if the binding does not exist.
Evaluation
We've just somewhat described what happens in the lower levels of eval. Let's finish the job and put eval in a code context. Here is the definition of a function compilation data structure:
struct Compiler<'parent> {
bytecode: CellPtr<ByteCode>,
/// Next available register slot.
next_reg: Register,
/// Optional function name
name: Option<String>,
/// Function-local nested scopes bindings list (including parameters at outer level)
vars: Variables<'parent>,
}
The two interesting members are
bytecode, which is an instance of ByteCodevars, an instance ofVariableswhich we've described above. This instance will be the outermost scope of theletor function block being compiled.
The main entrypoint to this structure is the function compile_function():
fn compile_function<'guard>(
mut self,
mem: &'guard MutatorView,
name: TaggedScopedPtr<'guard>,
params: &[TaggedScopedPtr<'guard>],
exprs: &[TaggedScopedPtr<'guard>],
) -> Result<ScopedPtr<'guard, Function>, RuntimeError> {
...
}
This function will set up a Variables scope with the given parameters and call
into function compile_eval() for each expression in the function. The full
definition of compile_eval() is below, and we'll go into the details of
compile_function() later.
fn compile_eval<'guard>(
&mut self,
mem: &'guard MutatorView,
ast_node: TaggedScopedPtr<'guard>,
) -> Result<Register, RuntimeError> {
match *ast_node {
Value::Pair(p) => self.compile_apply(mem, p.first.get(mem), p.second.get(mem)),
Value::Symbol(s) => {
match s.as_str(mem) {
"nil" => {
let dest = self.acquire_reg();
self.push(mem, Opcode::LoadNil { dest })?;
Ok(dest)
}
"true" => self.push_load_literal(mem, mem.lookup_sym("true")),
// Search scopes for a binding; if none do a global lookup
_ => {
match self.vars.lookup_binding(ast_node)? {
Some(Binding::Local(register)) => Ok(register),
Some(Binding::Upvalue(upvalue_id)) => {
// Retrieve the value via Upvalue indirection
let dest = self.acquire_reg();
self.push(
mem,
Opcode::GetUpvalue {
dest,
src: upvalue_id,
},
)?;
Ok(dest)
}
None => {
// Otherwise do a late-binding global lookup
let name = self.push_load_literal(mem, ast_node)?;
let dest = name; // reuse the register
self.push(mem, Opcode::LoadGlobal { dest, name })?;
Ok(dest)
}
}
}
}
}
_ => self.push_load_literal(mem, ast_node),
}
}
Note that the return type is Result<Register, RuntimeError>. That is, a
successful eval will return a register where the result will be stored at
runtime.
In the function body, the match branches fall into three categories:
- keywords literals (
nil,true) - all other literals
- named variables represented by
Symbols
What's in the evaluation of the Symbol AST type? Locals, nonlocals and
globals!
We can see the generation of special opcodes for retrieving nonlocal and global values here, whereas a local will resolve directly to an existing register without the need to generate any additional opcodes.
Application
To evaluate a function call, we switch over to apply:
match *ast_node {
...
Value::Pair(p) => self.compile_apply(mem, p.first.get(mem), p.second.get(mem)),
...
}
This is the evaluation of the Pair AST type. This represents, visually, the
syntax (function_name arg1 arg2 argN) which is, of course, a function call.
Eval cannot tell us the value of a function call, the function must be applied
to it's arguments first. Into apply we recurse.
The first argument to compile_apply() is the function name Symbol, the
second argument is the list of function arguments.
Since we included the full compile_eval() function earlier, it wouldn't be
fair to leave out the definition of compile_apply(). Here it is:
fn compile_apply<'guard>(
&mut self,
mem: &'guard MutatorView,
function: TaggedScopedPtr<'guard>,
args: TaggedScopedPtr<'guard>,
) -> Result<Register, RuntimeError> {
match *function {
Value::Symbol(s) => match s.as_str(mem) {
"quote" => self.push_load_literal(mem, value_from_1_pair(mem, args)?),
"atom?" => self.push_op2(mem, args, |dest, test| Opcode::IsAtom { dest, test }),
"nil?" => self.push_op2(mem, args, |dest, test| Opcode::IsNil { dest, test }),
"car" => self.push_op2(mem, args, |dest, reg| Opcode::FirstOfPair { dest, reg }),
"cdr" => self.push_op2(mem, args, |dest, reg| Opcode::SecondOfPair { dest, reg }),
"cons" => self.push_op3(mem, args, |dest, reg1, reg2| Opcode::MakePair {
dest,
reg1,
reg2,
}),
"cond" => self.compile_apply_cond(mem, args),
"is?" => self.push_op3(mem, args, |dest, test1, test2| Opcode::IsIdentical {
dest,
test1,
test2,
}),
"set" => self.compile_apply_assign(mem, args),
"def" => self.compile_named_function(mem, args),
"lambda" => self.compile_anonymous_function(mem, args),
"\\" => self.compile_anonymous_function(mem, args),
"let" => self.compile_apply_let(mem, args),
_ => self.compile_apply_call(mem, function, args),
},
// Here we allow the value in the function position to be evaluated dynamically
_ => self.compile_apply_call(mem, function, args),
}
}
The function parameter is expected to be a Symbol, that is, have a name
represented by a Symbol. Thus, the function is matched on the Symbol.
Caling nil?
Let's follow the compilation of a simple function: nil?. This is where we'll
start seeing some of the deeper details of compilation, such as register
allocation and
...
"nil?" => self.push_op2(mem, args, |dest, test| Opcode::IsNil { dest, test }),
...
The function nil? takes a single argument and returns:
- the
Symbolfortrueif the value of the argument isnil nilif the argument is notnil.
In compiling this function call, a single bytecode opcode will be pushed on to
the ByteCode array. This is done in the Compiler::push_op2() function. It is
named push_op2 because the opcode takes two operands: an argument register
and a result destination register. This function is used to compile all simple
function calls that follow the pattern of one argument, one result value. Here
is push_op2():
fn push_op2<'guard, F>(
&mut self,
mem: &'guard MutatorView,
params: TaggedScopedPtr<'guard>,
f: F,
) -> Result<Register, RuntimeError>
where
F: Fn(Register, Register) -> Opcode,
{
let result = self.acquire_reg();
let reg1 = self.compile_eval(mem, value_from_1_pair(mem, params)?)?;
self.bytecode.get(mem).push(mem, f(result, reg1))?;
Ok(result)
}
Let's break the function body down, line by line:
-
let result = self.acquire_reg();self.acquire_reg(): is called to get an unused register. In this case, we need a register to store the result value in. This register acquisition follows a stack approach. Registers are acquired (pushed on to the stack window) as new variables are declared within a scope, and popped when the scope is exited.- The type of
resultisRegisterwhich is an alias foru8- an unsigned int from 0 to 255.
-
let reg1 = self.compile_eval(mem, value_from_1_pair(mem, params)?)?;value_from_1_pair(mem, params)?: inspects the argument list and returns the argument if there is a single one, otherwise returns an error.self.compile_eval(mem, <arg>)?: recurses into the argument to compile it down to a something that can be applied to the function call.let reg1 = <value>;: wherereg1will be the argument register to the opcode.
-
self.bytecode.get(mem).push(mem, f(result, reg1))?;f(result, reg1): calls functionfthat will return the opcode with operands applied inByteCodeformat.- In the case of calling
nil?, the argumentfis:|dest, test| Opcode::IsNil { dest, test }
self.bytecode.get(mem).push(mem, <opcode>)?;: gets theByteCodereference and pushes the opcode on to the end of the bytecode array.
-
Ok(result)- the result register is returned to the
compile_apply()function
- the result register is returned to the
... and compile_apply() itself returns the result register to it's caller.
The pattern for compiling function application, more generally, is this:
- acquire a result register
- acquire any temporary intermediate result registers
- recurse into arguments to compile them first
- emit bytecode for the function, pushing opcodes on to the bytecode array and putting the final result in the result register
- release any intermediate registers
- return the result register number
Compiling nil? was hopefully quite simple. Let's look at something much more
involved, now.
Compiling anonymous functions
An anonymous function is defined, syntactically, as:
(lambda (param1 param2)
(expr1)
(expr2)
(return-expr))
There are 0 or more parameters and 1 or more expresssions in the body of the function. The last expression of the body provides the return value.
Function compilation is initiated by apply. This is because a function is a
compound expression and cannot be reduced to a value by a single eval. Here's
the line in compile_apply() that calls anonymous function compilation:
...
"lambda" => self.compile_anonymous_function(mem, args),
...
Let's look at the type signature of compile_anonymous_function():
fn compile_anonymous_function<'guard>(
&mut self,
mem: &'guard MutatorView,
params: TaggedScopedPtr<'guard>,
) -> Result<Register, RuntimeError> {
The params parameter will be expected to be a Pair list: firstly, a list of
parameter names, followed by function body expressions.
The return value from is the same as all the other compilation functions so far:
Result<Register>. The compiled code will return a pointer to the function
object in a register.
Here is the function in full:
fn compile_anonymous_function<'guard>(
&mut self,
mem: &'guard MutatorView,
params: TaggedScopedPtr<'guard>,
) -> Result<Register, RuntimeError> {
let items = vec_from_pairs(mem, params)?;
if items.len() < 2 {
return Err(err_eval(
"An anonymous function definition must have at least (lambda (params) expr)",
));
}
// a function consists of (name (params) expr1 .. exprn)
let fn_params = vec_from_pairs(mem, items[0])?;
let fn_exprs = &items[1..];
// compile the function to a Function object
let fn_object = compile_function(mem, Some(&self.vars), mem.nil(), &fn_params, fn_exprs)?;
// load the function object as a literal
let dest = self.push_load_literal(mem, fn_object)?;
// if fn_object has nonlocal refs, compile a MakeClosure instruction in addition, replacing
// the Function register with a Partial with a closure environment
match *fn_object {
Value::Function(f) => {
if f.is_closure() {
self.push(
mem,
Opcode::MakeClosure {
function: dest,
dest,
},
)?;
}
}
// 's gotta be a function
_ => unreachable!(),
}
Ok(dest)
}
After converting Pair lists to Vecs for convenience (wherein parameter names
and function body expressions are separated) the process calls into function
compile_function(), which brings us full circle to eval.
In compile_function(), below:
- a
Scopeis instantiated and the parameters are pushed on to this outermost scope. - the function body expressions are iterated over, eval-ing each one
- any upvalues that will be closed over as the compiled-function exits and goes out of scope have upvalue instructions generated
- a
Functionobject is returned with all details necessary to running the function in the VM environment
Here is compile_function():
fn compile_function<'guard>(
mut self,
mem: &'guard MutatorView,
name: TaggedScopedPtr<'guard>,
params: &[TaggedScopedPtr<'guard>],
exprs: &[TaggedScopedPtr<'guard>],
) -> Result<ScopedPtr<'guard, Function>, RuntimeError> {
// validate function name
self.name = match *name {
Value::Symbol(s) => Some(String::from(s.as_str(mem))),
Value::Nil => None,
_ => {
return Err(err_eval(
"A function name may be nil (anonymous) or a symbol (named)",
))
}
};
let fn_name = name;
// validate arity
if params.len() > 254 {
return Err(err_eval("A function cannot have more than 254 parameters"));
}
// put params into a list for the Function object
let fn_params = List::from_slice(mem, params)?;
// also assign params to the first level function scope and give each one a register
let mut param_scope = Scope::new();
self.next_reg = param_scope.push_bindings(params, self.next_reg)?;
self.vars.scopes.push(param_scope);
// validate expression list
if exprs.len() == 0 {
return Err(err_eval("A function must have at least one expression"));
}
// compile expressions
let mut result_reg = 0;
for expr in exprs.iter() {
result_reg = self.compile_eval(mem, *expr)?;
}
// pop parameter scope
let closing_instructions = self.vars.pop_scope();
for opcode in &closing_instructions {
self.push(mem, *opcode)?;
}
// finish with a return
let fn_bytecode = self.bytecode.get(mem);
fn_bytecode.push(mem, Opcode::Return { reg: result_reg })?;
let fn_nonlocals = self.vars.get_nonlocals(mem)?;
Ok(Function::alloc(
mem,
fn_name,
fn_params,
fn_bytecode,
fn_nonlocals,
)?)
}
Note that in addition to generating upvalue instructions as the
compiled-function goes out of scope, the calling compiler function
compile_anonymous_function() will issue a MakeClosure opcode such that a
closure object is put in the return register rather than a direct Function
object reference.
In our language, a closure object is represented by the Partial data structure
- a struct that represents a
Functionobject pointer plus closed over values and/or partially applied arguments. This data structure was described in the chapter Virtual Machine: Implementation.
Thus ends our tour of our interpreter.
Concluding remarks
In this section, we've looked at a ground-up compiler and virtual machine implementation within a memory-safe allocation system.
There is, of course, much more to explore in the VM and compiler source code. The reader is encouraged to experiment with running and modifying the source.